 PDF(5453 KB)
PDF(5453 KB)
 PDF(5453 KB)
PDF(5453 KB)
PDF(5453 KB)
PDF(5453 KB)
复合微下击暴流风场下小型无人机的飞行分析
Flight Analysis of Small UAV Under Composite Micro-downburst Wind Field
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
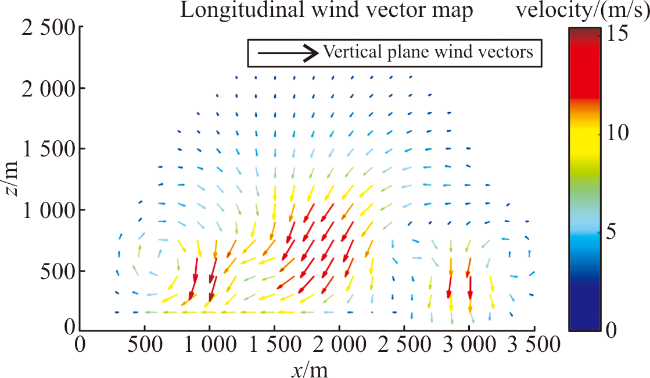
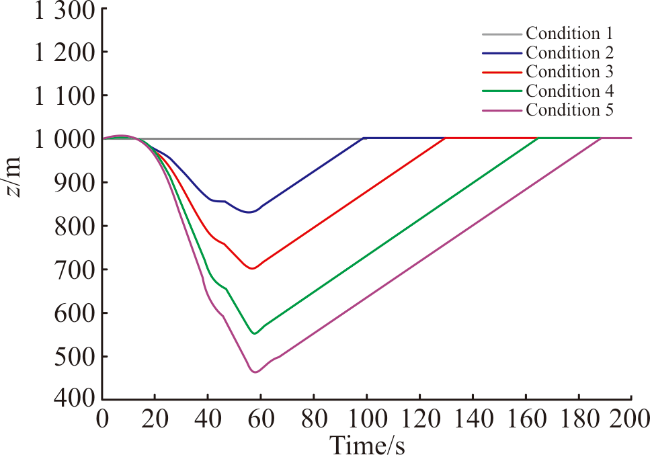
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}为研究复合微下击暴流风场对轻小型固定翼无人机巡航段的影响,文中构建了Dryden大气紊流模型与微下击暴流风场模型,融合后得到复合微下击暴流风场,并以电动无人机为例,进行了六自由度刚体弹道模型仿真分析。仿真结果表明,所建立的复合风场具有较好的随机特性与典型的风切变特征,能够有效描述实际复合微下击暴流风场的分布及变化;在风场影响下,该电动无人机高度损失明显,在中心诱导速度为10~25 m/s时,损失高度达168~537 m;此外,无人机的航时、攻角、侧滑角以及动力余量等飞行参数亦发生了不同程度的变化。
To study the influence of the composite microburst wind field on the cruise phase of a light and small fixed-wing unmanned aerial vehicle (UAV), in this paper, a Dryden atmospheric turbulence model and a microburst model are constructed, and after fusing them, a composite microburst wind field model is created. Take a specific electric-powered UAV as the object of study and carry out a six-degree-of-freedom rigid body ballistic model simulation analysis, the simulation results show that the newly established composite wind field model has better randomness and typical wind shear characteristics and it can effectively depict the actual composite microburst wind field distribution and change. Under the influence of this composite wind field, the UAV has experienced a significant loss of height, and when the central induced velocity is between 10~25 m per second, the loss of height reached 168~537 m. Furthermore, the flight parameters of UAV, including flight duration, angle of attack, sideslip angle, and power margin, have changed in different degree.
Dryden模型 / 微下击暴流 / 无人机 / 巡航段 {{custom_keyword}} /
Dryden model / micro-downburst / UAV / cruise phase {{custom_keyword}} /
表1 各涡环模型参数表Table 1 Parameter table of each vortex ring model |
| Parameter | Model name | |||
|---|---|---|---|---|
| A | B | C | D | |
| | 1 700 | 1 700 | 800 | 2 800 |
| | 1 700 | 1 700 | 1 600 | 1 600 |
| | 610 | 610 | 400 | 400 |
| | 800 | 800 | 400 | 400 |
| v0/(m/s) | 15 | 15 | 11 | 11 |
| | 500 | 500 | 200 | 200 |
| | 0 | 15 | 0 | 15 |
| | 0 | 30 | 0 | 15 |
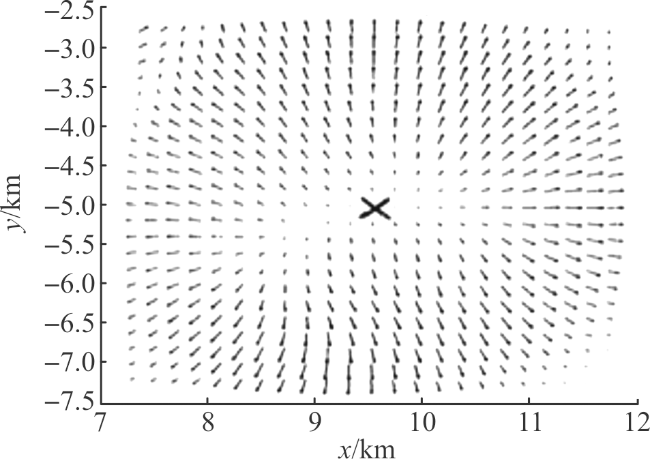
图5 单涡环对在z=100 m处剖面的风矢量分布图Fig.5 Wind vector distribution diagram of the section at z=100 m for a single vortex ring pair |
表2 飞行状态初值表Table 2 Flight status initial value table |
| Parameter | Value |
|---|---|
| (x,y,z)/m | (0,1 000,1 700) |
| (Vx,Vy,Vz)/(m/s) | (60,0,0) |
| | (0,0,0) |
| (ωx,ωy,ωz)/(rad/s) | (0,0,0) |
表3 飞行参数仿真结果Table 3 Flight parameter simulation results table |
| Condition | x/m | K/% | d/m |
|---|---|---|---|
| 1 | 12 000 | — | 0 |
| 2 | 11 872 | -5.14 | 168.72 |
| 3 | 11 826 | -3.34 | 298.62 |
| 4 | 11 784 | -1.80 | 446.59 |
| 5 | 11 790 | -2.46 | 537.02 |
| [1] |
郭锡福. 远程火炮武器系统射击精度分析[M]. 北京: 国防工业出版社, 2004.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
李宏海, 欧进萍. 我国下击暴流的时空分布特性[J]. 自然灾害学报, 2015, 24(6):9-18.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
陈健伟, 王良明, 傅健. 用于实时弹道仿真的低空风切变复合模型[J]. 系统工程与电子技术, 2019, 41(11):2597-2604.
风切变是一种形成概率高、危害范围广的气象现象,对弹箭飞行具有较大影响。针对几种典型低空风切变的流动特点,基于位势流动理论,分别建立了微下击暴流涡环模型、过山气流圆柱绕流模型和低空急流平面壁面射流模型。在此基础上,以发射坐标系为基准,提出一种考虑天气和地形的低空风切变复合模型。以某122 mm火箭弹为例,进行算例仿真。仿真结果表明:所建立的低空风切变复合模型具有良好的三维特性,能够合理描述典型风切变现象的气体流动特点。应用于实时弹道仿真中,可有效反映出复杂环境下不同种类低空风切变对弹箭飞行的影响规律。
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
陈健伟, 王良明, 李子杰. 两种典型低空风切变对火箭弹弹道特性的影响[J]. 北京航空航天大学学报, 2018, 44(5):1008-1017.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
王晋, 田军委, 刘雪松, 等. 湿微下击暴流对火炮外弹道精度影响分析[J]. 弹箭与制导学报, 2022, 42(6):99-106.
针对湿微下击暴流特性会对火炮射程、侧偏等参数产生一定的偏差,对火炮的射击精度影响较大问题,以155 mm火炮杀爆弹为研究对象,基于涡环原理与流体力学建立微下击暴流与雨滴运动模型,并融合为适用于弹道分析计算的湿微下击暴流模型,将湿微下击暴流模型与火炮6自由度弹道方程结合,仿真并分析不同初始涡环中心诱导速度对火炮平射与曲射两种发射方式射击精度的影响。实验结果表明:对于低伸弹道,外弹道侧偏与偏航角增加比例随着初始中心涡环诱导速度的增加而减小;而对于远距离射击,火炮射程随着初始涡环中心诱导速度的增大而减小,严重影响火炮的射击精度与杀伤效果。
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
王晋, 田军委, 刘雪松, 等. 山地低空气流对火炮外弹道产生偏差分析[J]. 火力与指挥控制, 2023, 48(8):53-59.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
刘时杰, 徐浩军, 薛源, 等. 具有湍流效应的不规则微下击暴流构建方法研究[J]. 飞行力学, 2014(4):303-307.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
肖业伦, 金长江. 大气扰动中的飞行原理[M]. 北京: 国防工业出版社, 1993.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
马泽昊, 郭利明, 张泽华, 等. 基于涡环法的微下击暴流风场建模分析与应用[C]// 第八届中国航空学会青年科技论坛论文集. 广东: 中国航空学会, 2018:701-710.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
陶杨, 韩维, 吴亮. 虚拟时变微下击暴流的数值仿真方法[J]. 应用力学学报, 2014, 31(6):847-852.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
高振兴. 复杂大气扰动下大型飞机飞行实时仿真建模研究[D]. 南京: 南京航空航天大学, 2009.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
王文龙. 大气风场模型研究及应用[D]. 长沙: 国防科学技术大学, 2009.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
李传荣, 唐伶俐, 李晓辉, 等. 无人机遥感载荷成像风场传递效应分析[M]. 北京: 科学出版社, 2018.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
蔡坤宝, 罗汉文. 产生高斯随机序列的新方法[J]. 上海交通大学学报, 2004, 38(12):2052-2056.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [17] |
屈香菊, 李勇. 一种改进的紊流风模型及其仿真算法[J]. 系统仿真学报, 2004, 16(1):10-16.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [18] |
钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2013.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [19] |
林海, 王晓芳. 飞行力学数值仿真[M]. 北京: 北京理工大学出版社, 2018.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [20] |
高振兴, 顾宏斌. 用于飞行实时仿真的微下击暴流建模研究[J]. 系统仿真学报, 2008, 20(23):6524-6528.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|


 PDF(5453 KB)
PDF(5453 KB)
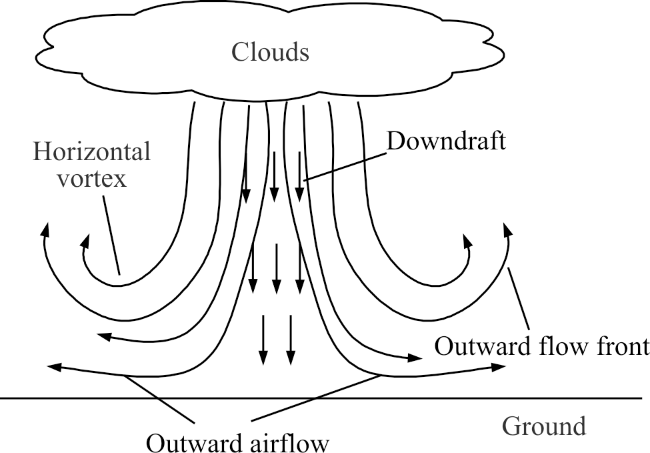
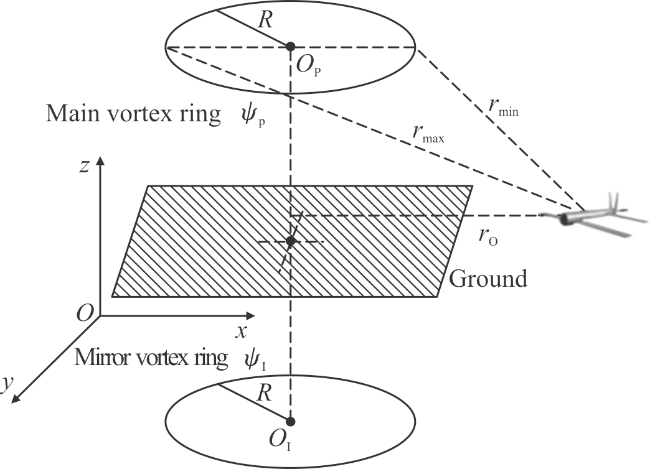
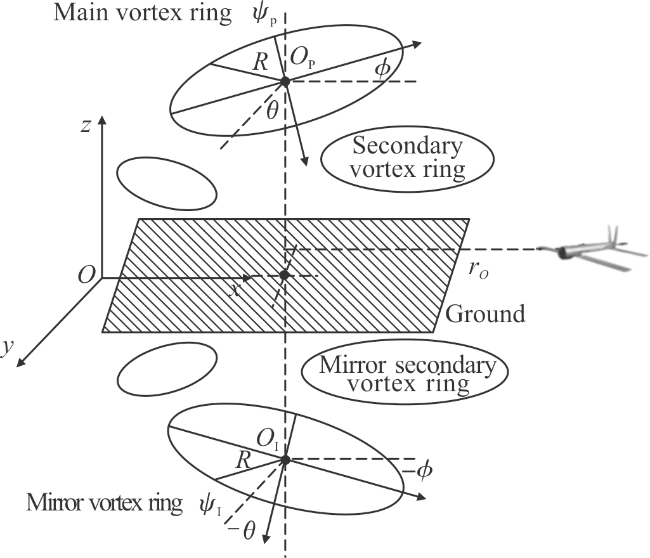
 图1 下击暴流形成示意图图2 对称涡环对设置示意图图3 多倾斜涡环对设置示意图
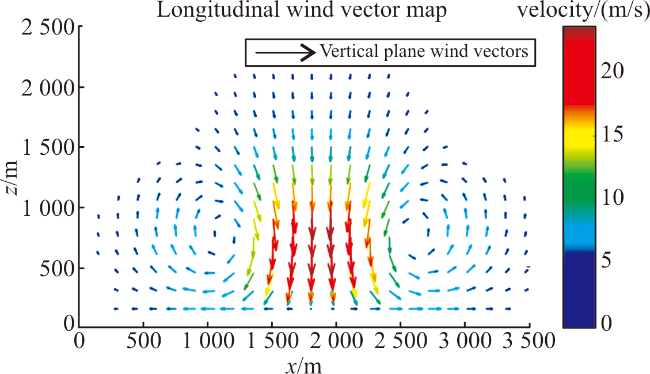
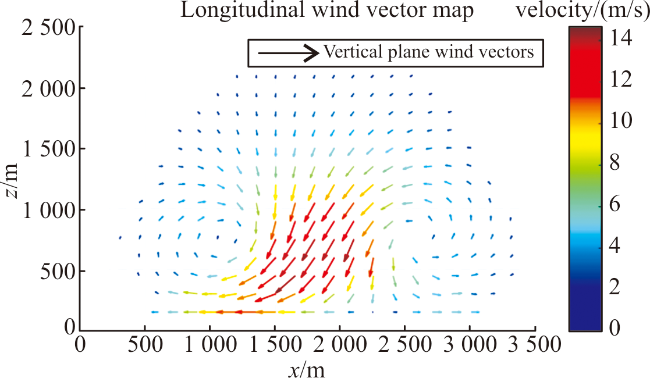
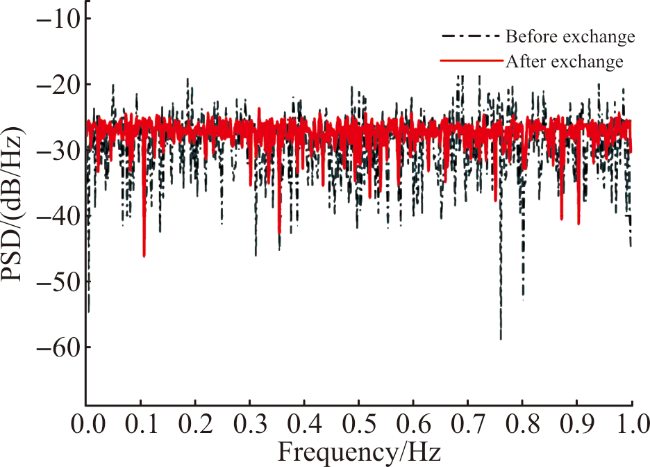
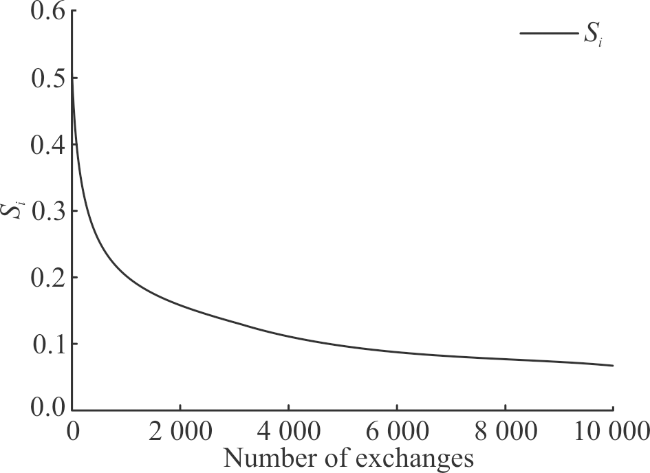
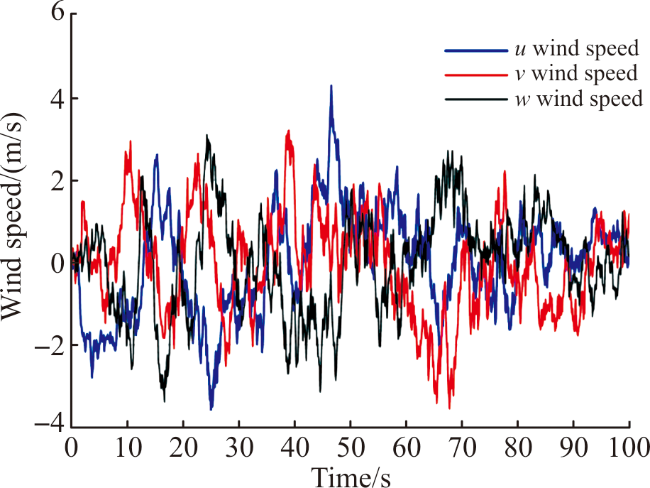
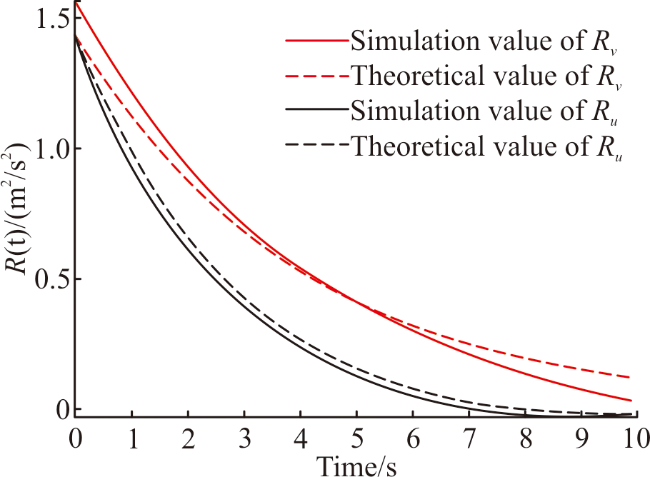
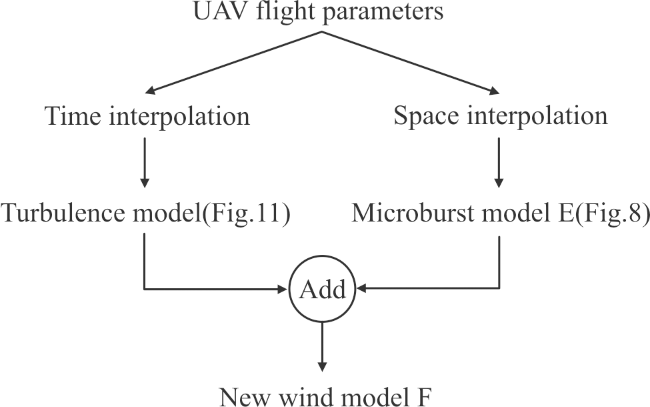
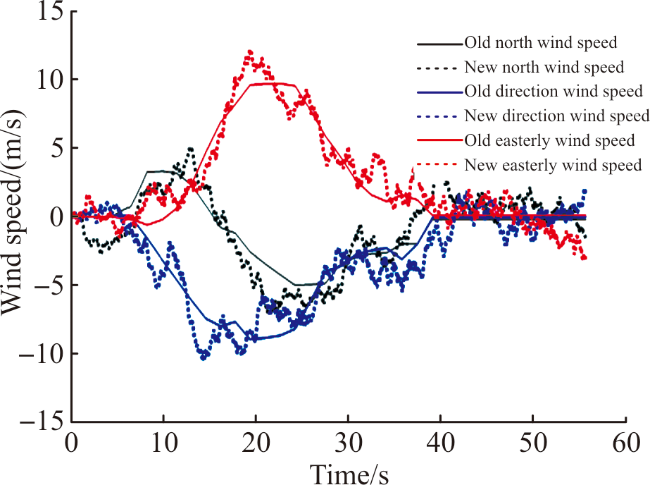
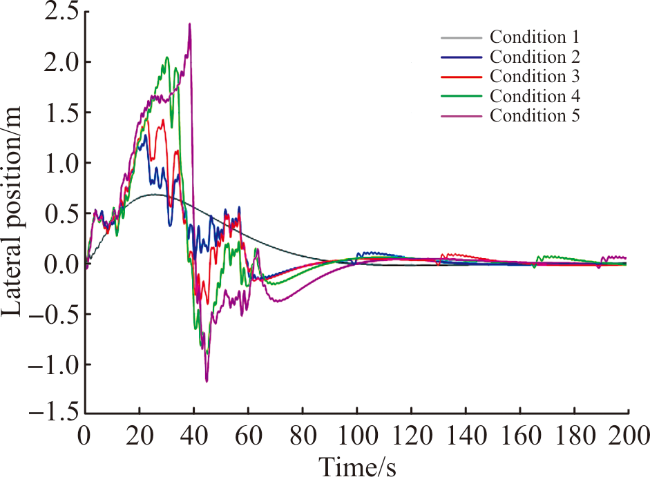
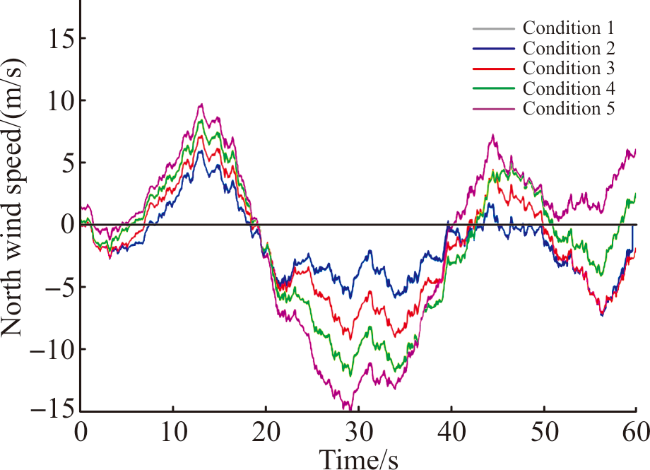
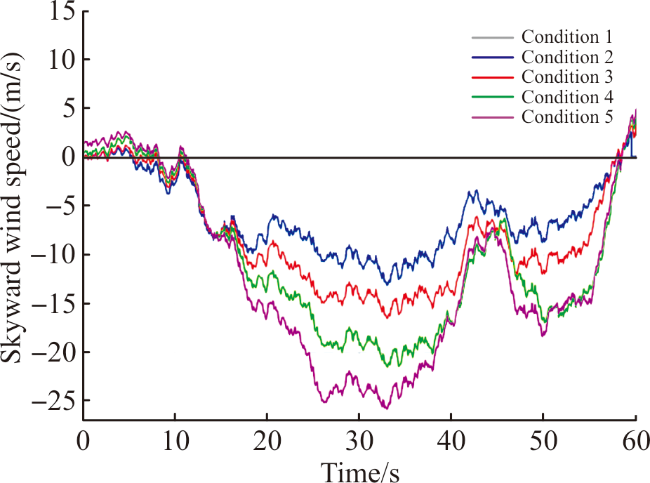
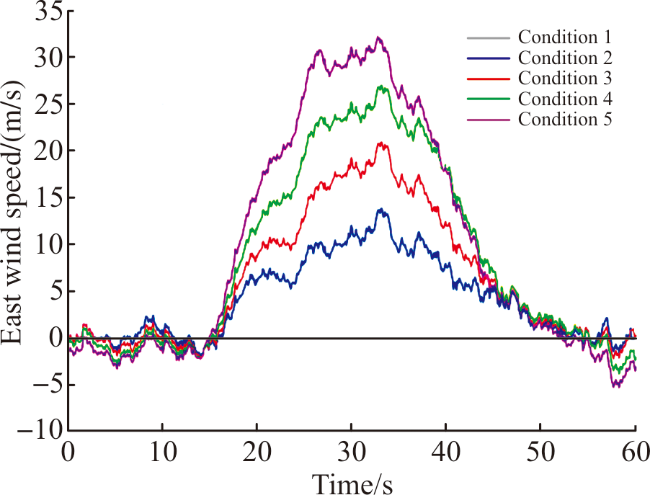
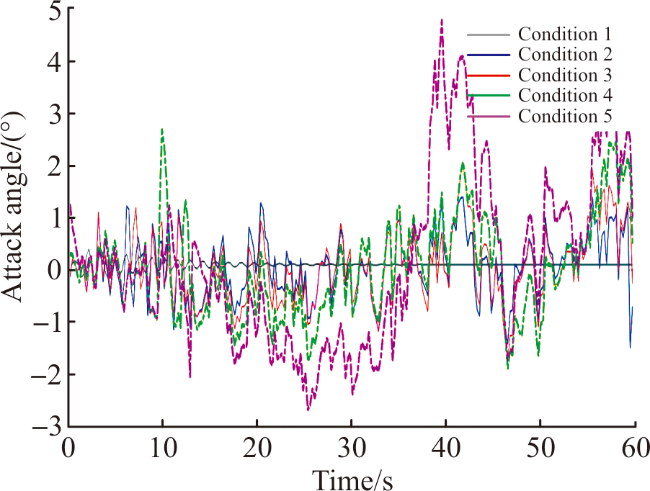
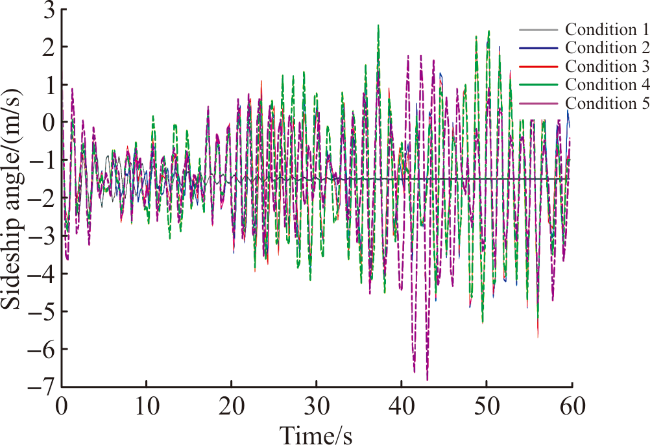
图1 下击暴流形成示意图图2 对称涡环对设置示意图图3 多倾斜涡环对设置示意图 表1 各涡环模型参数表图4 NASA 1988 年美国丹佛微下击暴流事故风场图[12]图5 单涡环对在z=100 m处剖面的风矢量分布图图6 模型A的风矢量分布图图7 模型B的风矢量分布图图8 模型E的风矢量分布图图9 优化后功率谱密度(PSD)对比图图10 自相关系数平方和变化图图11 v,u,w三向紊流风速图图12 横纵向风速相关性检验图13 融合过程示意图图14 融合前后的风场对比图表2 飞行状态初值表表3 飞行参数仿真结果图15 高度变化对比图图16 侧向位置变化对比图图17 北向风速对比图图18 天向风速对比图图19 东向风速对比图图20 攻角变化对比图图21 侧滑角变化对比图
表1 各涡环模型参数表图4 NASA 1988 年美国丹佛微下击暴流事故风场图[12]图5 单涡环对在z=100 m处剖面的风矢量分布图图6 模型A的风矢量分布图图7 模型B的风矢量分布图图8 模型E的风矢量分布图图9 优化后功率谱密度(PSD)对比图图10 自相关系数平方和变化图图11 v,u,w三向紊流风速图图12 横纵向风速相关性检验图13 融合过程示意图图14 融合前后的风场对比图表2 飞行状态初值表表3 飞行参数仿真结果图15 高度变化对比图图16 侧向位置变化对比图图17 北向风速对比图图18 天向风速对比图图19 东向风速对比图图20 攻角变化对比图图21 侧滑角变化对比图/
| 〈 |
|
〉 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}