 PDF(5392 KB)
PDF(5392 KB)
 PDF(5392 KB)
PDF(5392 KB)
PDF(5392 KB)
PDF(5392 KB)
基于火箭橇的变马赫气流扩张通道研究
 ({{custom_author.role_cn}}), {{javascript:window.custom_author_cn_index++;}}
({{custom_author.role_cn}}), {{javascript:window.custom_author_cn_index++;}}Research on Variable Hetz Airflow Expansion Channel Based on Rocket Sled
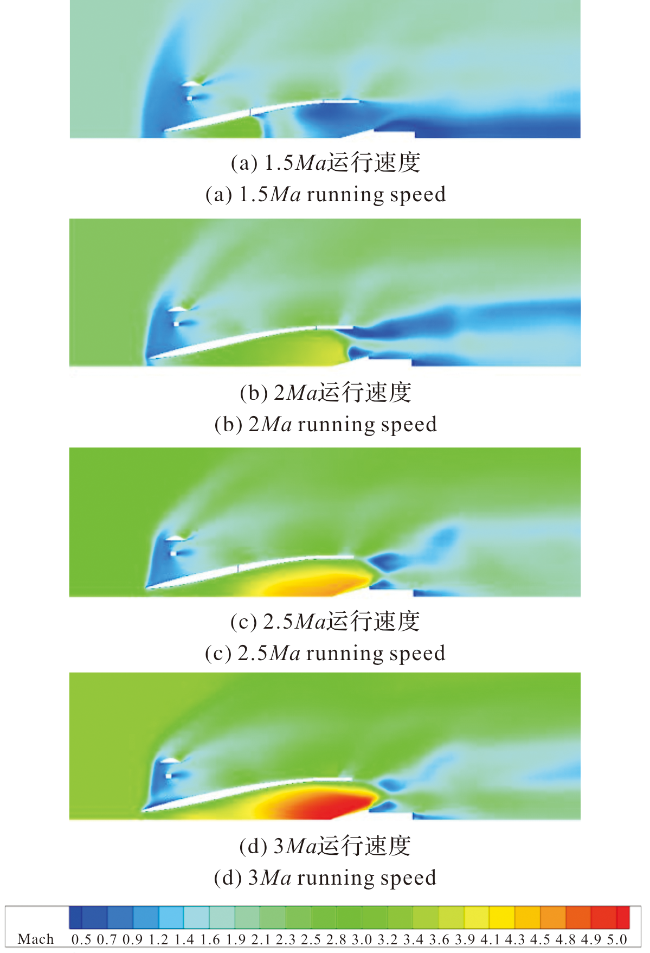
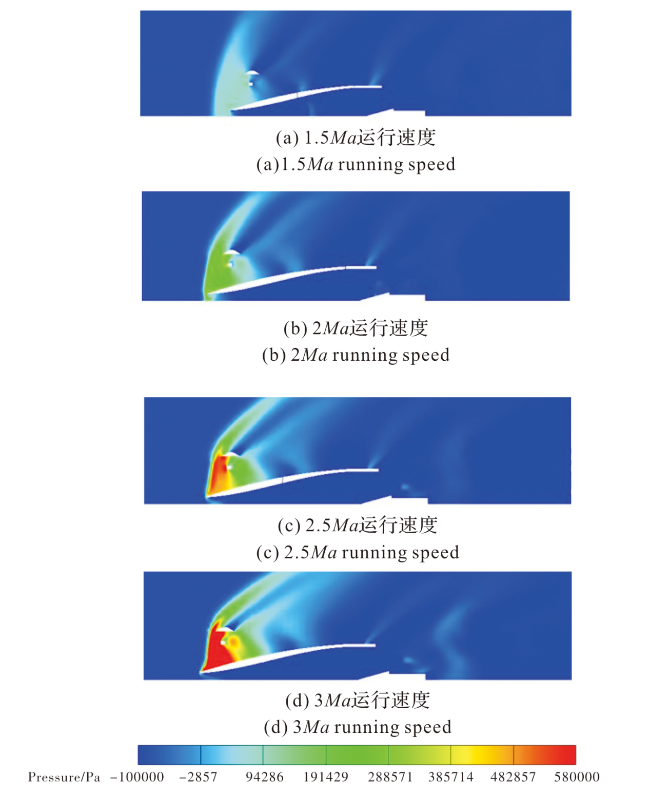
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}针对火箭橇气流通道装置开展设计与数值模拟研究。首先,将气流扩张通道内部划分为初始源流膨胀区、消波区和均匀流试验区,然后,应用Foelsch方法对初始膨胀段型线进行设计,采用基于轴线马赫数预设的特征线方法对过渡消波段进行设计,最后,针对扩张比为2.5的火箭橇气流扩张装置,在运行速度为1.5Ma、2Ma、2.5Ma和3Ma条件下开展数值模拟分析,结果表明,通道进口膨胀波随着运行速度的增加而减弱,1.5Ma速度条件下的相对压力峰值为0.14 MPa,3Ma速度条件的相对压力峰值为0.018 MPa,相对压力峰值下降约87%,使进口条件得到改善,最大马赫数模拟偏差为3.9%,静压模拟偏差为6.5%。
The application of airflow expansion channel device in rocket sled test can obtain higher airflow velocity at the exit, so as to realize the simulation of hypersonic environment. The design and numerical simulation of airflow channel device for rocket sled are studied. Firstly, the internal part of the air expansion channel is divided into initial source flow expansion area, wave attenuation area and uniform flow test area. Foelsch method is used to design the initial expansion section profile, and the characteristic method based on the preset Mach number of the axis is used to design the transition wave attenuation band. On this basis, numerical simulation analysis is carried out for the rocket sled air expander with a growth rate of 2.5 at the operating speeds of 1.5Ma, 2Ma, 2.5Ma and 3Ma. The results showed that the expansion wave at the inlet of the channel weakened with the increase of the operating speed. The peak relative pressure at 1.5Ma is 0.14MPa, and the peak relative pressure at 3Ma is 0.018 MPa. The decrease of relative pressure is about 87% and the inlet condition is improved. After data comparison,the maximum mach number simulation deviation is 3.9%, and the static pressure simulation deviation is 6.5%.
火箭橇 / 高超声速环境 / 气流扩张通道 / 特征线方法 {{custom_keyword}} /
rocket sled / hypersonic environment / air-expansion channel / characteristic method {{custom_keyword}} /
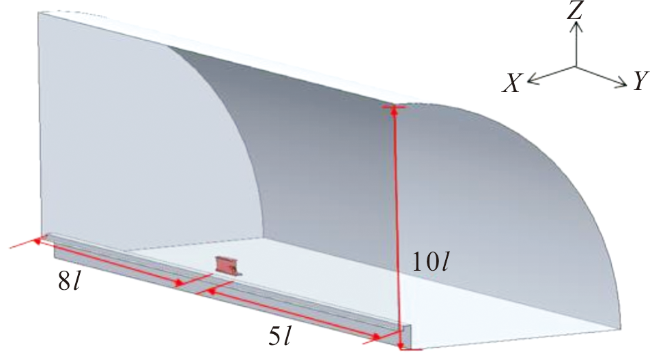
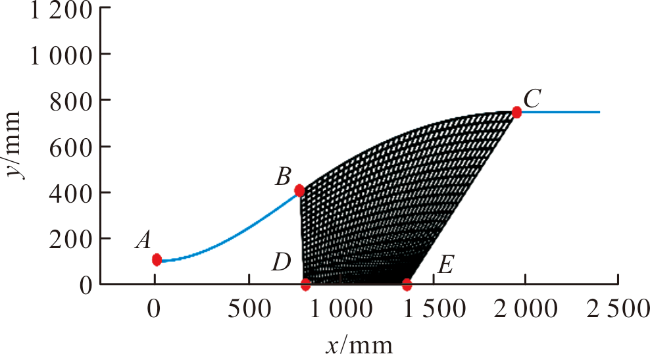
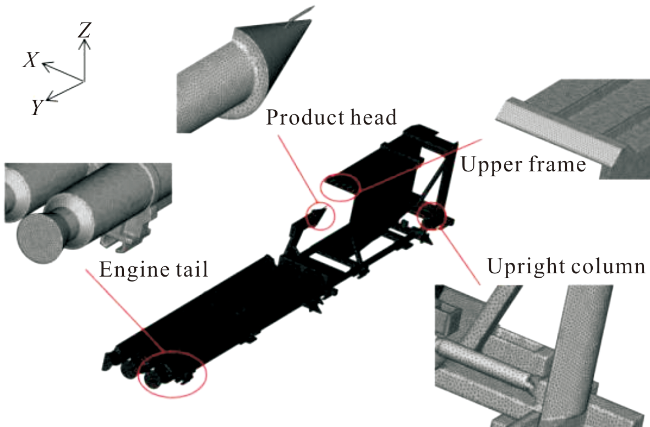
图8 气流扩张通道火箭橇流场仿真区域Fig.8 Simulation area of rocket sled flow field in airflow expansion channel |

图15 验证试验空速管仿真试验对比Fig.15 Comparison of simulation and reality of airspeed tube test data in verification test |
表1 不同扩张比下火箭橇运行速度与试验区域最大马赫数仿真值对应关系Table 1 Corresponding relationship between the running speed of the rocket sled and the simulation value of the maximum Mach number in the test area under different expansion ratios |
| Expansion ratio | Running speed/Ma | Maximum Mach number/Ma |
|---|---|---|
| 2.2 | 357 | 2.06 |
| 2.2 | 476 | 2.63 |
| 2.2 | 544 | 2.65 |
| 2.2 | 612 | 2.92 |
| 2.2 | 680 | 3.20 |
| 2.2 | 710 | 3.27 |
| 4.5 | 710 | 3.62 |
| 4.5 | 748 | 3.72 |
| [1] |
肖军, 耿强, 徐进欣, 等. 常规兵器火箭橇试验速度影响因素分析[J]. 兵器装备工程学报, 2021, 42(3): 83-87.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
夏有财, 孙其会, 肖军, 等. 火箭橇运动计算算法优化与试验验证[J]. 航空动力学报, 2021, 36(7): 1564-1568.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
余元元, 叶俊杰, 张雨诗, 等. 火箭橇轨道系统瞬态动力学特性研究[J]. 兵器装备工程学报, 2019, 40(12): 205-209.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
汪运鹏, 姜宗林. 高超声速喷管设计理论与方法[J]. 力学进展, 2021, 51(2): 257-294.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
刘亚洲, 李平, 陈宏玉, 等. 不同延伸段压力分布的双钟形喷管设计[J]. 航空动力学报, 2022, 37(2): 424-432.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
王英鹏, 徐义华, 孙海俊, 等. 基于响应面法的火箭发动机喷管型面优化设计[J]. 航空动力学报, 2022, 37(1): 214-224.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
陈以勒, 俞凯凯, 徐惊雷. 几何尺寸约束的超燃冲压发动机推力喷管设计[J]. 航空学报, 2021, 42(6): 253-263.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
张亚林, 李晓松. 改进AOA结合贝塞尔曲线平滑的机器人路径规划[J]. 计算机工程与设计, 2023, 44(10): 3170-3178.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
张晨辉, 徐健. 火箭橇试验战斗部动态攻角交互式计算与验证[J]. 弹箭与制导学报, 2020, 40(2): 89-92.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|


 PDF(5392 KB)
PDF(5392 KB)
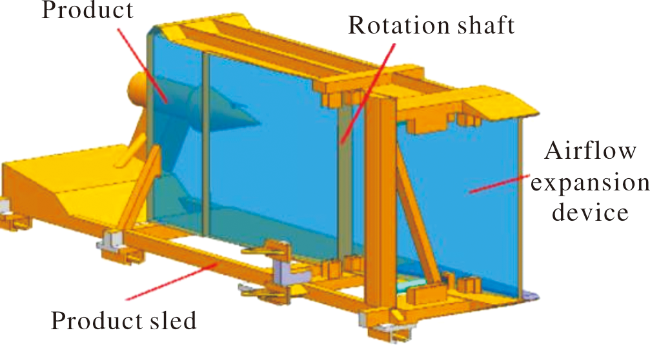
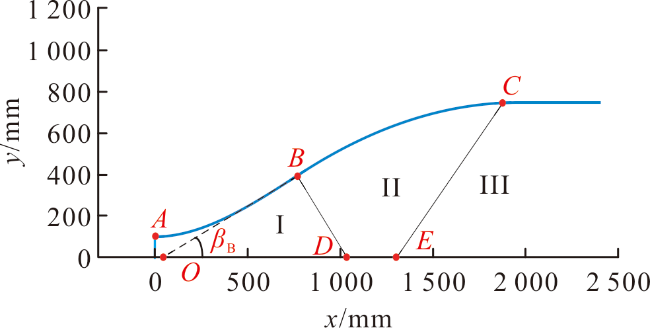
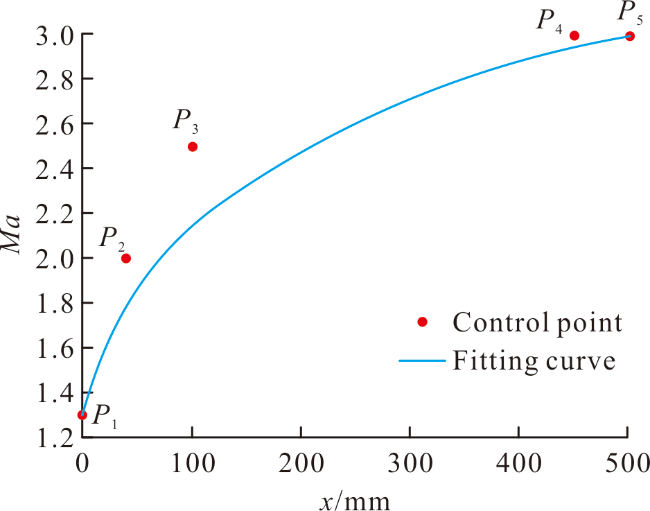
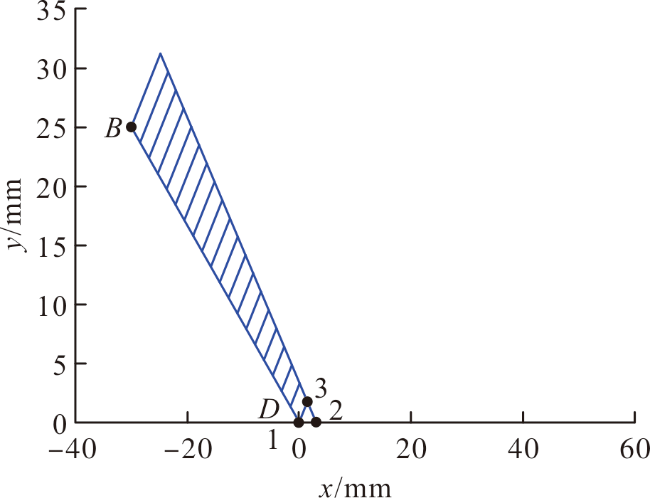
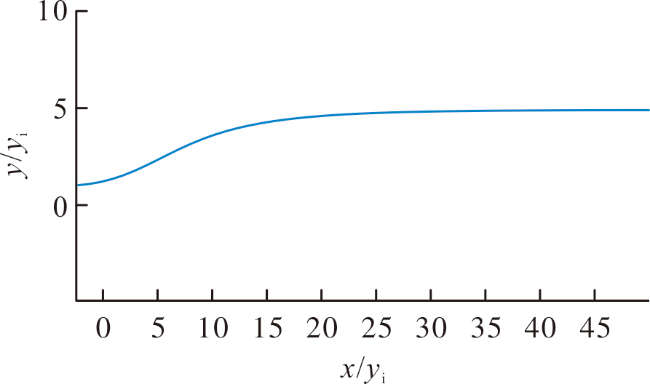
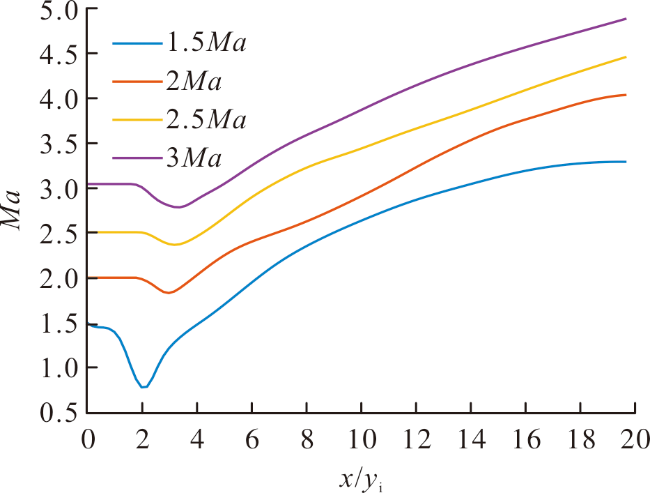
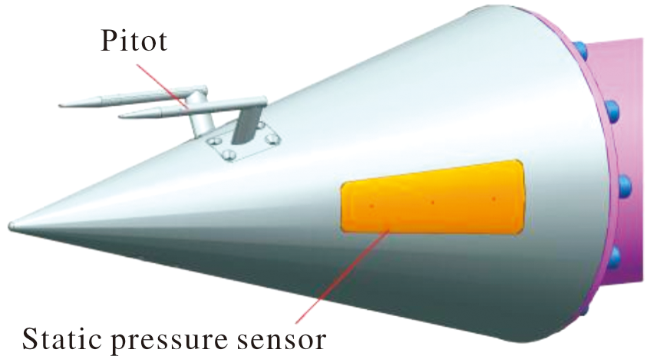
 图1 火箭橇超声速气动环境模拟装置结构示意图图2 扩张通道装置结构示意图图3 轴向马赫数示意图图4 特征线方程迭代求解示意图图5 特征线方法设计结果图6 气流扩张通道二维设计结果图7 双轨火箭橇气流通道结构图8 气流扩张通道火箭橇流场仿真区域图9 气流扩张通道火箭橇网格划分结果图10 不同运行速度条件下气流扩张通道内部马赫数分布图11 不同运行速度下气流通道内部轴线上马赫数分布图12 不同运行速度条件下气流扩张通道内部压力分布图13 不同运行速度下气流通道内部轴线上压力分布图14 测试元件布设图图15 验证试验空速管仿真试验对比
图1 火箭橇超声速气动环境模拟装置结构示意图图2 扩张通道装置结构示意图图3 轴向马赫数示意图图4 特征线方程迭代求解示意图图5 特征线方法设计结果图6 气流扩张通道二维设计结果图7 双轨火箭橇气流通道结构图8 气流扩张通道火箭橇流场仿真区域图9 气流扩张通道火箭橇网格划分结果图10 不同运行速度条件下气流扩张通道内部马赫数分布图11 不同运行速度下气流通道内部轴线上马赫数分布图12 不同运行速度条件下气流扩张通道内部压力分布图13 不同运行速度下气流通道内部轴线上压力分布图14 测试元件布设图图15 验证试验空速管仿真试验对比 表1 不同扩张比下火箭橇运行速度与试验区域最大马赫数仿真值对应关系图16 静压测点仿真试验一致性对比曲线
表1 不同扩张比下火箭橇运行速度与试验区域最大马赫数仿真值对应关系图16 静压测点仿真试验一致性对比曲线/
| 〈 |
|
〉 |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}