 PDF(11079 KB)
PDF(11079 KB)
 PDF(11079 KB)
PDF(11079 KB)
PDF(11079 KB)
PDF(11079 KB)
攻角对超空泡射弹波浪环境入水影响研究
Research on Influence of Attack Angle on Water-entry Trajectory Characteristics of Supercavitation Projectiles in Wave Environment
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
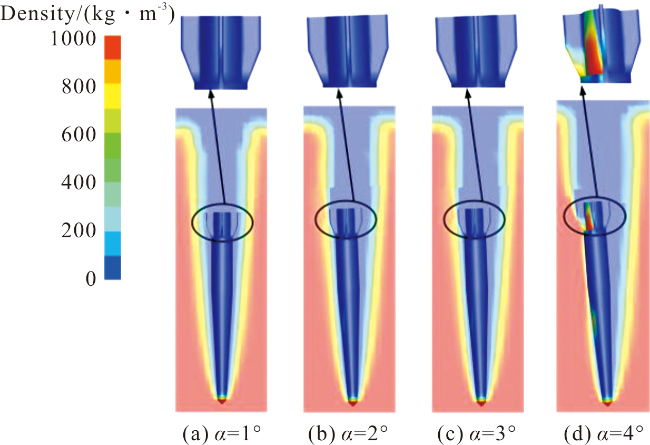
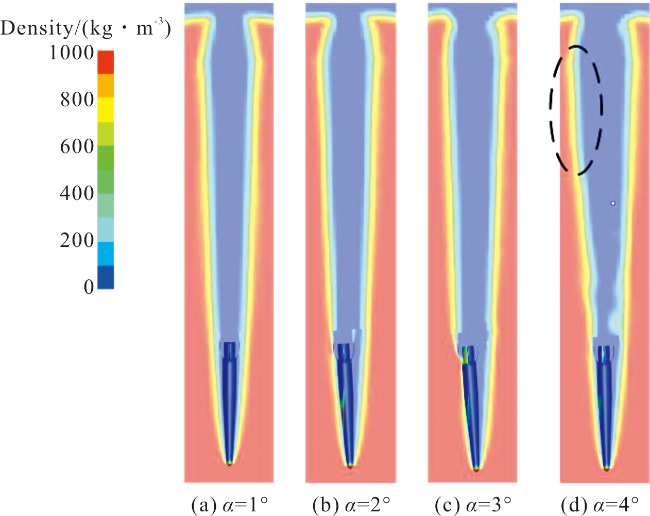
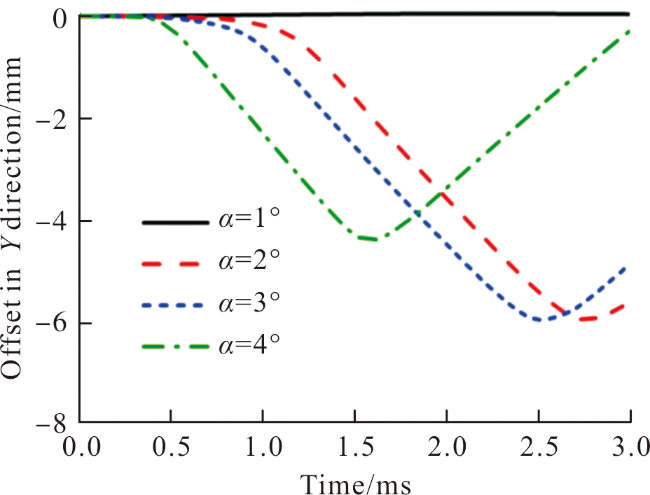
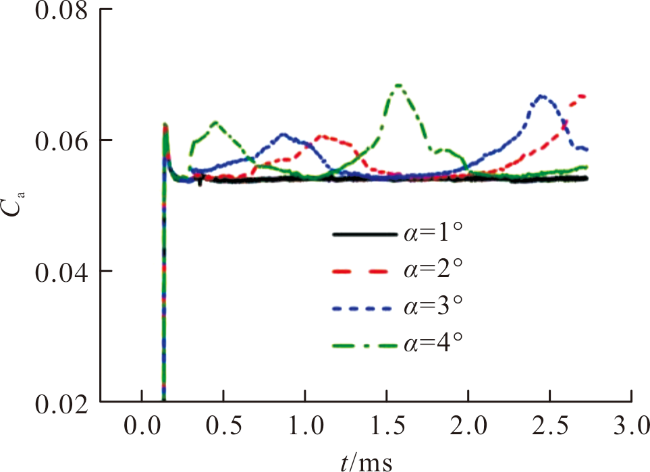
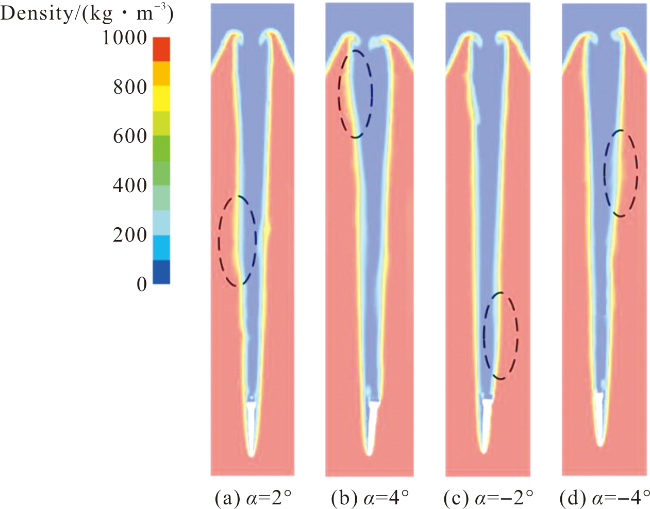
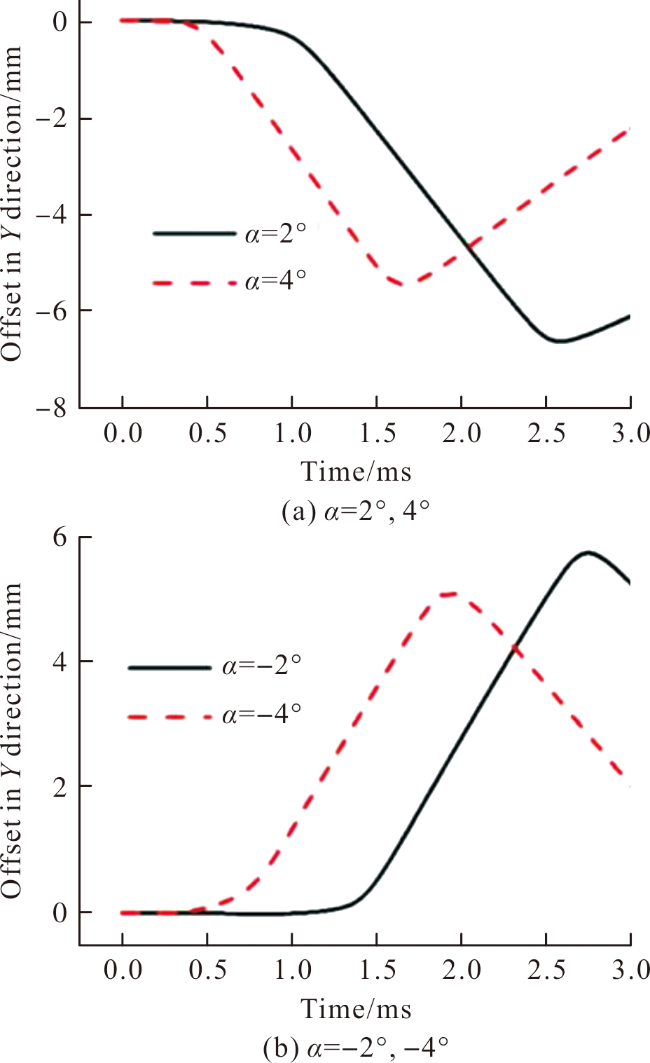
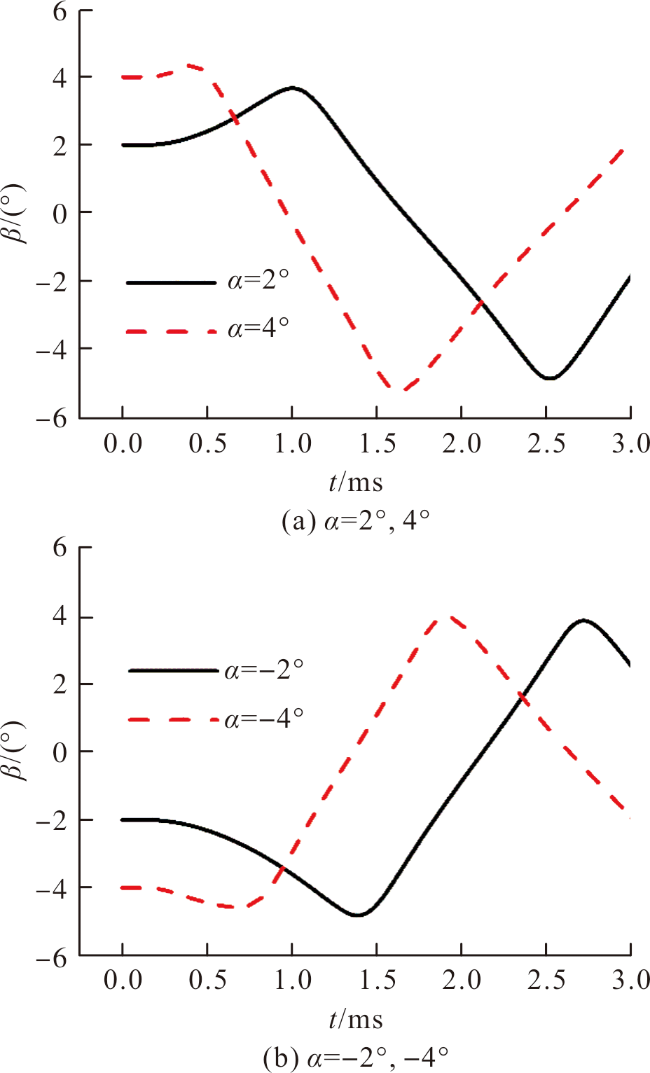
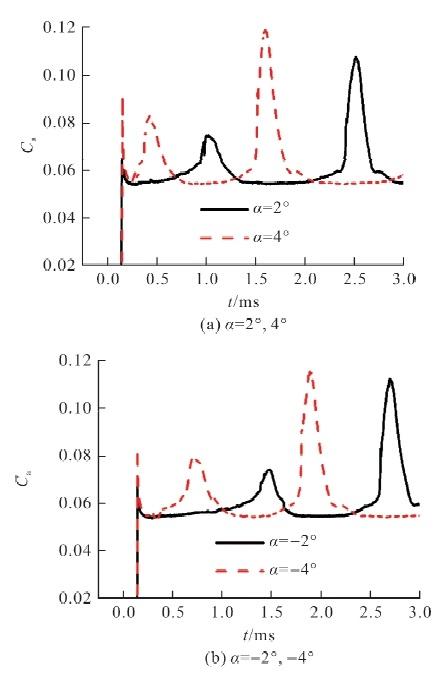
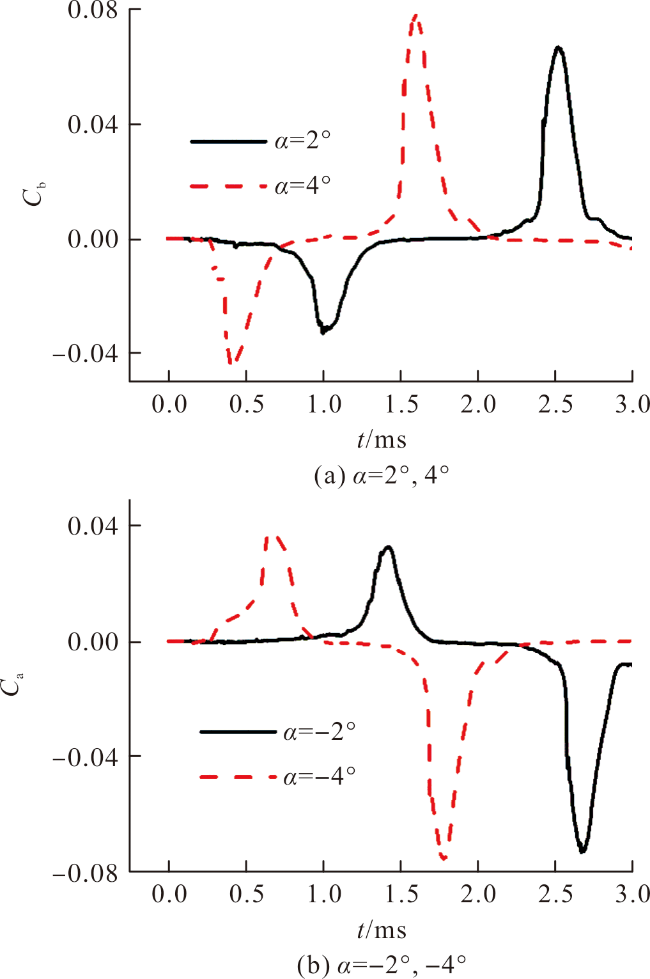
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}为获取超空泡射弹不同攻角入水时的空泡演化与运动特性变化规律,基于RANS方程、Schnerr-Sauer空化模型、k-ε湍流模型,采用重叠网格技术,针对入水速度400 m/s不变,入水攻角不同时,静水与波浪环境下的超空泡射弹入水过程开展了数值模拟研究。研究结果表明:攻角大于2°时,弹丸将在入水过程中出现尾拍现象,尾拍时尾翼划破空泡壁,会造成空泡在此区域的扩张,并对弹道稳定性产生不利影响;尾拍现象发生时,阻力系数和升力系数均会上升,且攻角越大,上升的幅值越大;在波浪环境下,弹丸入水过程中仍然会发生尾拍运动,但与静水环境相比,在尾拍发生的时间上有一定区别。攻角为正时尾拍出现的时间提前,反之则尾拍出现的时间延后。
To obtain the water-entry cavitation evolution and motion characteristics of supercavitation projectiles in different attack angle, the water-entry process of constant water-entry speed and different attack angle in hydrostatic and wave environment is simulated by using RANS equation, k-ε turbulence model, Schnerr-Sauer cavitation model and overset mesh. The result shows that the projectile will have an obvious tail-slap phenomenon in the process of water-entry when the attack angle is larger than 2°. When tail-slap phenomenon occurs, the tail wing cuts through the cavity wall, which cause the expansion of the cavity in this area and adversely affect the trajectory stability. Furthermore, both the drag and lift coefficients will rise, and the higher the angle of attack, the greater the rise. In the wave environment, the tail-slap phenomenon will still occur in the process of the projectile entering the water, but compared with the static water environment, there is a certain difference in the time of the tail-slap. When the attack angle is positive, the time of the tail-slap is advanced, otherwise it will be delayed.
超空泡 / 入水攻角 / 波浪环境 / 空泡演化 / 运动特性 / 数值模拟 {{custom_keyword}} /
supercavitation / water-entry attack angle / wave environment / cavitation evolution / motion characteristic / numerical simulation {{custom_keyword}} /
表1 计算工况表Table 1 Calculation working condition table |
| Parameter | Calm environment | Wave environment |
|---|---|---|
| Initial velocity/(m/s) | 400 | 400 |
| Attack angle/(°) | 1,2,3,4 | 2,-2,4,-4 |
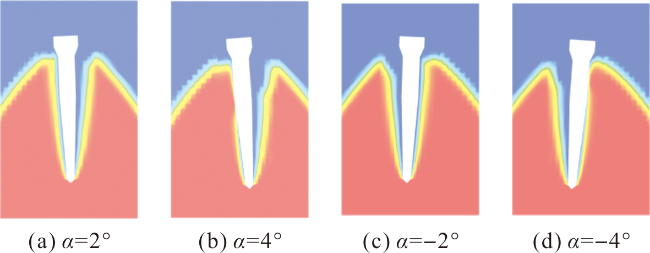
图18 t=0.3 ms时不同攻角下的入水密度云图Fig.18 Density contours of different attack angles at 0.3 ms |
| [1] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
黄闯, 罗凯, 白杰, 等. 液体可压缩性对超空化流动的影响[J]. 上海交通大学学报, 2016, 50(8): 1241-1245.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
温俊生, 施红辉, 徐胜利, 等. 头型对回转体垂直入水时空泡面闭合影响的数值模拟[J]. 浙江理工大学学报(自然科学版), 2018, 39(5): 573-579.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
陈晨, 魏英杰, 王聪, 等. 射弹跨声速入水初期阶段多相流场特性数值研究[J]. 振动与冲击, 2019, 38(6): 46-53.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
秦杨, 易文俊, 管军. 超空泡枪弹高速倾斜入水的空化流动数值模拟[J]. 兵器装备工程学报, 2019, 40(7): 99-104.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
钱铖铖, 余春华, 穆青, 等. 发射速度和发射角度对射弹高速入水流动的影响[J]. 兵器装备工程学报, 2019, 40(7): 35-39.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
汪振, 吴茂林, 戴文留. 大口径弹体高速入水载荷特性研究[J]. 弹道学报, 2020, 32(1): 15-22.
针对未来海上平台发射大口径抛射体入水冲击载荷问题,为了研究速度接近200 m/s时,不同速度、入水角度以及攻角对大口径平头弹体入水径向载荷以及轴向载荷的影响,基于LS-DYNA软件,采用多介质ALE方法,对速度在150~190 m/s,入水角度在45°~60°之间,具有3°~7°攻角的弹体入水模型进行数值模拟。结果表明:在同一入水速度的情况下,轴向载荷峰值随入水角度的增加而增加,径向载荷峰值随着入水角度的改变有一定的波动; 在入水初期,径向载荷到达峰值后慢慢趋于稳定并收敛于0; 径向载荷的峰值出现在轴向载荷撞水瞬间产生的第1次小峰值时刻; 正攻角会使弹体产生顺时针旋转的径向载荷,负攻角会使弹体产生逆时针旋转的径向载荷,载荷大小随着攻角数值大小的增大而增大。
Aiming at the problem of water entry overload of large caliber projectile launched by offshore platforms in the future,the effects of different velocities,water inflow angles,and angle of yaw on the radial and axial loads of large caliber flat-nosed projectiles with the velocity approaching 200 m/s were studied. Based on LS-DYNA software,the multi-medium Arabic Lagrange Euler(ALE)method was used to simulate the water entry model of a projectile with velocity of 150-190 m/s,water inflow angle of 45°-60° and angle of yaw of 3°-7°. At the same velocity,the peak value of axial load increases with the increase of water entry angle,and the peak value of radial load fluctuates with the change of water entry angle. At the initial stage of water inflow,the radial load gradually stabilizes and converges to zero after reaching its peak value. The peak value of radial load occurs at the first small peak moment when the axial load collides with water. The positive angle of attack will cause the radial load of clockwise rotation,while the negative angle of attack will cause the radial load of counter-clockwise rotation. The magnitude of the load increases with the increase of the numerical value of the angle of attack.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
杨晓光, 党建军, 王鹏, 等. 波面环境对高速入水载荷及弹道特性影响试验研究[J]. 西北工业大学学报, 2021, 39(6): 1259-1265.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|


 PDF(11079 KB)
PDF(11079 KB)
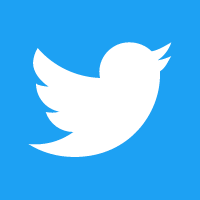
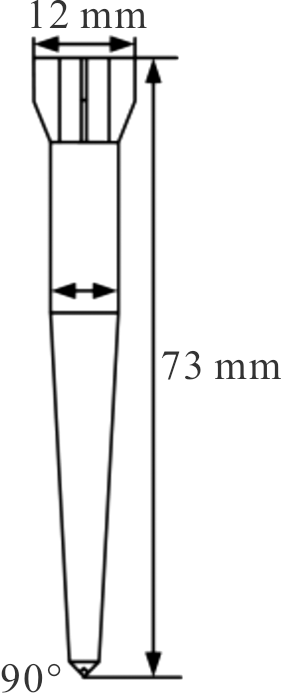
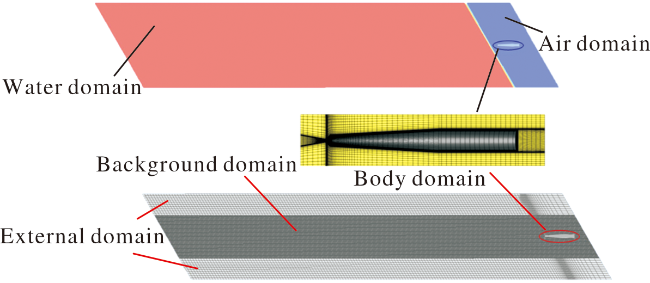
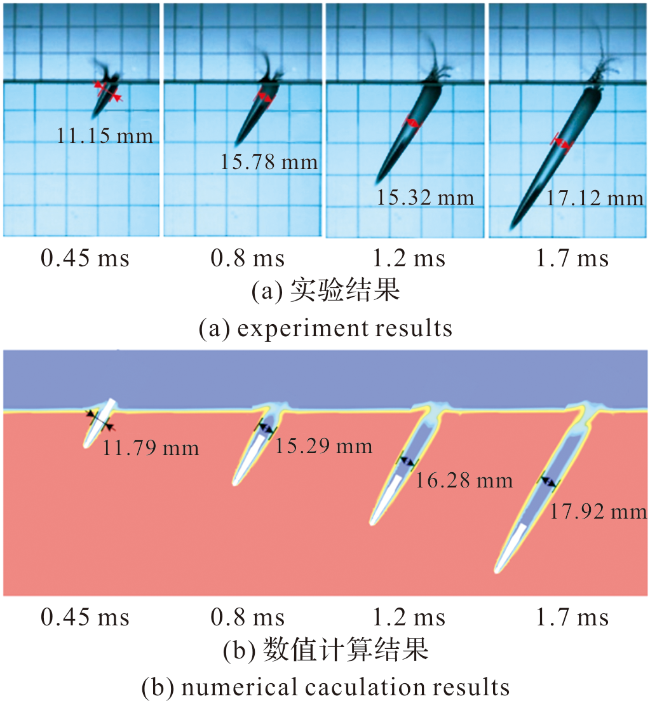
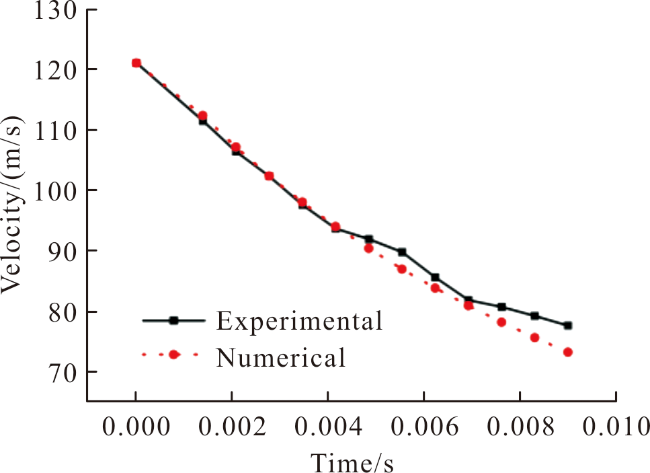
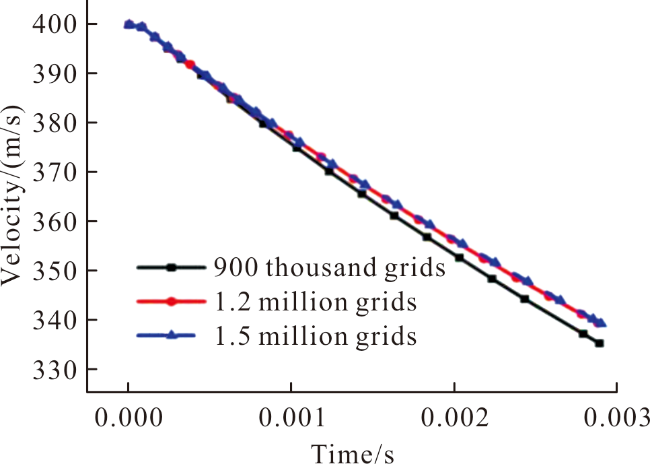
 图1 结构参数示意图图2 运动参数示意图图3 网格划分示意图图4 边界条件设置图5 实验系统与弹丸模型示意图图6 计算域设置与网格划分图7 计算与实验的空泡形态对比图图8 计算与实验的速度衰减曲线对比图图9 网格无关性验证结果
图1 结构参数示意图图2 运动参数示意图图3 网格划分示意图图4 边界条件设置图5 实验系统与弹丸模型示意图图6 计算域设置与网格划分图7 计算与实验的空泡形态对比图图8 计算与实验的速度衰减曲线对比图图9 网格无关性验证结果 表1 计算工况表图10 t=0.4 ms时不同入水攻角下的密度云图图11 t=0.4 ms时不同攻角下弹丸附近的压力云图图12 t=0.8 ms时不同入水攻角下的密度云图图13 不同入水攻角下Y向弹道偏移量随时间的变化曲线图14 不同入水攻角下的偏转角随时间变化曲线图15 不同入水攻角下阻力系数随时间变化曲线图16 不同入水攻角下升力系数随时间变化曲线图17 边界造波示意图图18 t=0.3 ms时不同攻角下的入水密度云图图19 t=0.3 ms时弹体表面水的体积分数云图图20 t=0.3 ms时弹尖附近的压力云图图21 t=1.6 ms时不同攻角下的密度云图图22 不同入水攻角下Y向弹道偏移量随时间的变化曲线图23 不同入水攻角下的偏转角随时间变化曲线图24 不同入水攻角下的阻力系数随时间变化曲线图25 不同入水攻角下的升力系数随时间变化曲线
表1 计算工况表图10 t=0.4 ms时不同入水攻角下的密度云图图11 t=0.4 ms时不同攻角下弹丸附近的压力云图图12 t=0.8 ms时不同入水攻角下的密度云图图13 不同入水攻角下Y向弹道偏移量随时间的变化曲线图14 不同入水攻角下的偏转角随时间变化曲线图15 不同入水攻角下阻力系数随时间变化曲线图16 不同入水攻角下升力系数随时间变化曲线图17 边界造波示意图图18 t=0.3 ms时不同攻角下的入水密度云图图19 t=0.3 ms时弹体表面水的体积分数云图图20 t=0.3 ms时弹尖附近的压力云图图21 t=1.6 ms时不同攻角下的密度云图图22 不同入水攻角下Y向弹道偏移量随时间的变化曲线图23 不同入水攻角下的偏转角随时间变化曲线图24 不同入水攻角下的阻力系数随时间变化曲线图25 不同入水攻角下的升力系数随时间变化曲线/
| 〈 |
|
〉 |









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}