 PDF(1626 KB)
PDF(1626 KB)

Research on Deformation of Shock Absorber of SINS Under Vibration and Impingement
CHENG Yaoqiang, ZHU Qiju, ZHAO Zhiyuan, SUN Mingyao, YANG Pengxiang
JPRMG ›› 2024, Vol. 44 ›› Issue (2) : 36-41.
PDF(1626 KB)
PDF(1626 KB)
Research on Deformation of Shock Absorber of SINS Under Vibration and Impingement
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}For the shock absorber, the traditional research focuses mainly on the vibration damping effect, material life, etc., but pays less attention to the navigation error brought by its strain and deformation, and too much emphasis is placed on the theoretical research without the support of experimental data, which is lack of persuasiveness,in this paper,static and dynamic measurement schemes are developed based on the design of shock absorber of strap-down inertial navigation system(SINS). Firstly, a pair of plane mirrors which is perpendicular to each other is fixed on the vibration fixture. And then SINS is installed on the vibration fixture through shock absorbers. Finally, four devices of optical projection and imaging are set up to record the reflected light spots of SINS and plane mirrors before and after the vibration and impingement. Through the calculation of the displacement change of light spots, deformation of shock absorber is determined. The results show that the maximum angle of deformation of SINS caused by shock absorber deformation is 6.26″,which is far lower than installation error stability (generally less than 1.0') between SINS and carrier. The spatial deformation of the shock absorber has a small effect on the navigation error of SINS. The test scheme and measured dates in this paper can be as reference for design and application of SINS shock absorber.
shock absorber / deformation / vibration and impingement / SINS {{custom_keyword}} /
Table 1 Deformation of the shock absorber before and after vibration and impingement表1 振动冲击前后减振器形变量 |
| Number of shock absorber | l1/mm | l2/mm | Δl/μm |
|---|---|---|---|
| 1 | 6.452 | 6.454 | 2 |
| 2 | 6.449 | 6.450 | 1 |
| 3 | 6.451 | 6.449 | 2 |
| 4 | 6.450 | 6.450 | 0 |
Table 2 Displacement change of light spots before and after Y-axis mechanical test表2 Y轴力学试验前后光斑位移情况 |
| Number of light spot | Displacement change/mm |
|---|---|
| 1 | 0.10(vertical down) |
| 2 | 0.00 |
| 3 | 0.15(vertical down) |
| 4 | 0.00 |
Table 3 Displacement change of light spots before and after X-axis mechanical test表3 X轴力学试验前后光斑位移情况 |
| Number of light spot | Displacement change/mm |
|---|---|
| 1 | 0.00 |
| 2 | 0.15(horizontal movement) |
| 3 | 0.15(horizontal movement) |
| 4 | 0.00 |
| [1] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
刘志军. 强力学条件下光纤捷联系统结构实证研究[D]. 哈尔滨: 哈尔滨工程大学, 2012.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
张敏. 地地导弹惯性测量装置减振安装结构设计[D]. 长沙: 国防科技大学, 2012.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
姚建军, 闫红松, 李欣, 等. SINS减振系统参数与耦合角运动的关系[J]. 中国惯性技术学报, 2021, 29(5): 576-582.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
罗华, 肖凯, 余鲲, 等. 惯组减振系统设计及试验研究[J]. 压电与声光, 2021, 43(3): 402-405.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
王营辉. 基于扭振减振器的轧机轴系扭转振动特性分析及控制研究[D]. 秦皇岛: 燕山大学, 2021.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
李晓颜, 黄加才, 王建月, 等. 一类抗冲击载荷的新型橡胶减振器[J]. 宇航材料工艺, 2013, 24(7): 42-45.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
李茜, 吕琛, 李欣, 等. 捷联惯组空间八点减振IMU组合设计[J]. 导航定位与授时, 2022, 9(5): 118-124.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
周建波, 蔡毅鹏, 孙学麒, 等. 航天器捷联惯组基座构型设计[J]. 兵器装备工程学报, 2018(2): 36-40.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
屈进红, 王明, 姜作喜, 等. 航空重力仪两级减振系统设计与研究[J]. 振动与冲击, 2022, 41(11): 97-103.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
王新龙. 捷联式惯导系统动静基座初始对准[M]. 西安: 西北工业大学出版社, 2013.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
任剡, 房建成, 许端. 直升机光纤陀螺IMU抗振设计及实时滤波方法[J]. 北京航空航天大学学报, 2013, 39(4): 437-441.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|


 PDF(1626 KB)
PDF(1626 KB)
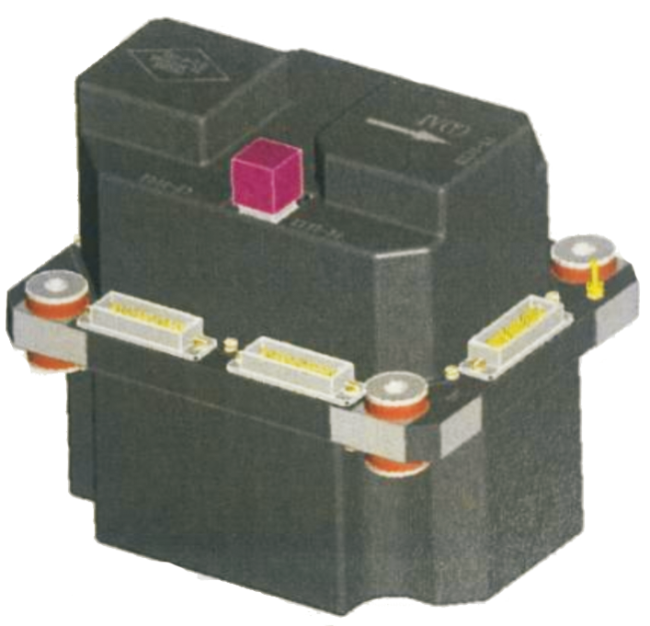
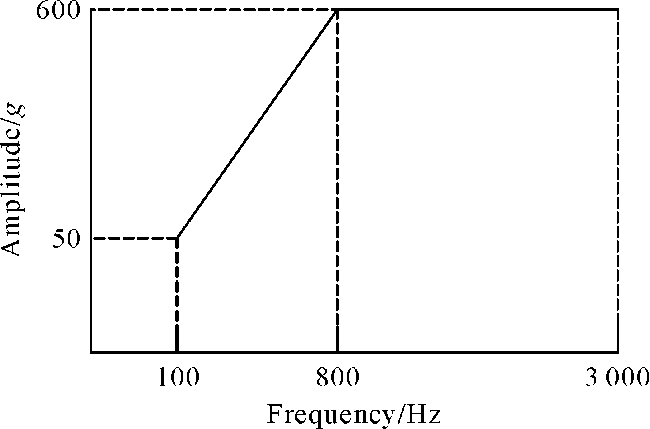
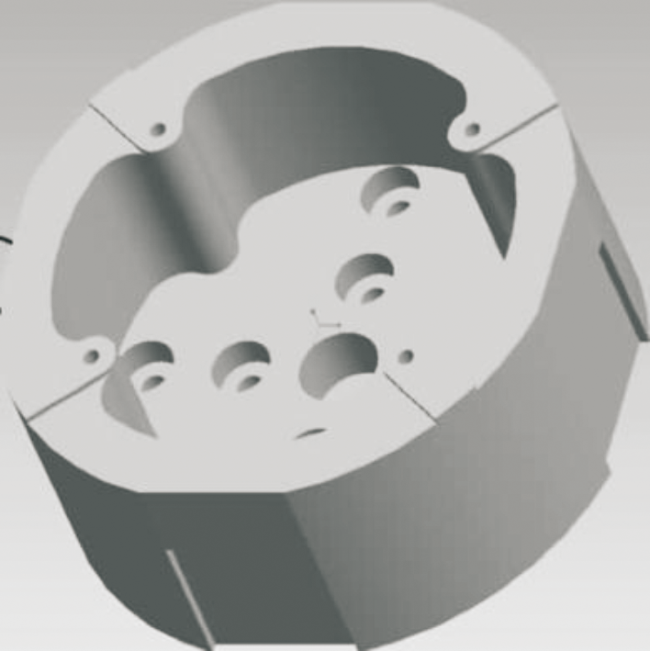
 Fig.1 Schematic diagram of four sets of T-type shock absorbers mounted on SINSFig.2 Random vibration test curve of SINSFig.3 Impingement test curve of SINSFig.4 Vibration tooling for testingFig.5 Physical picture of optical projection and imaging equipmentFig.6 Dynamic test schematic diagram
Fig.1 Schematic diagram of four sets of T-type shock absorbers mounted on SINSFig.2 Random vibration test curve of SINSFig.3 Impingement test curve of SINSFig.4 Vibration tooling for testingFig.5 Physical picture of optical projection and imaging equipmentFig.6 Dynamic test schematic diagram Table 1 Deformation of the shock absorber before and after vibration and impingementTable 2 Displacement change of light spots before and after Y-axis mechanical testTable 3 Displacement change of light spots before and after X-axis mechanical test
Table 1 Deformation of the shock absorber before and after vibration and impingementTable 2 Displacement change of light spots before and after Y-axis mechanical testTable 3 Displacement change of light spots before and after X-axis mechanical test/
| 〈 |
|
〉 |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}