 PDF(2686 KB)
PDF(2686 KB)

Cooperative Control of UAV Swarm Based on Specific Limited Interaction Rules
ZHU Baitao, DENG Yimin, DUAN Haibin
JPRMG ›› 2022, Vol. 42 ›› Issue (6) : 1-5.
PDF(2686 KB)
PDF(2686 KB)
Cooperative Control of UAV Swarm Based on Specific Limited Interaction Rules
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
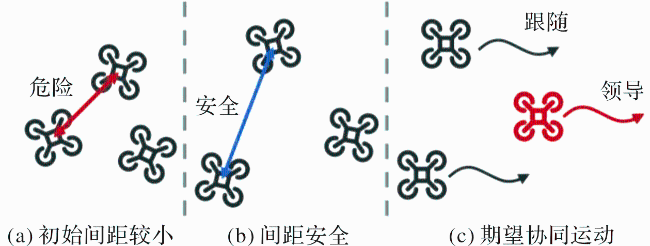
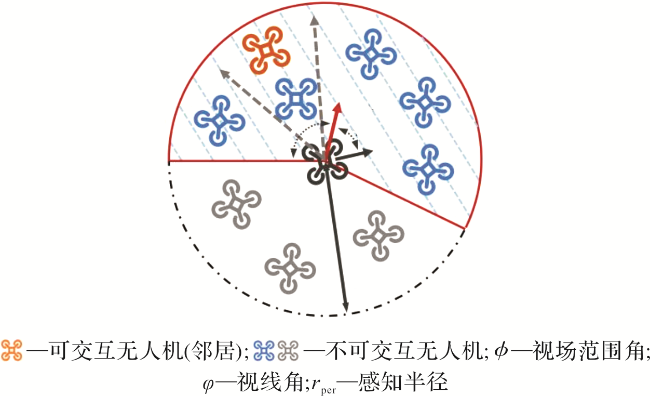
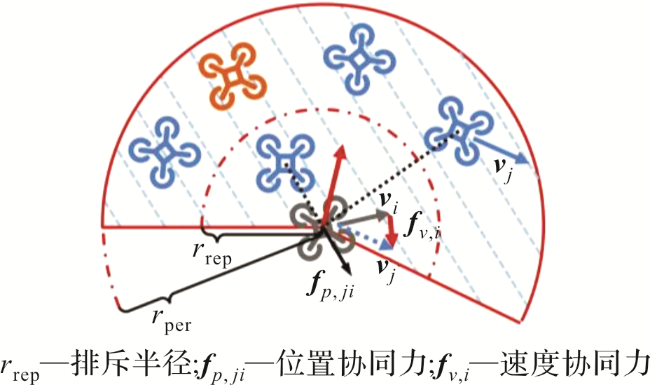
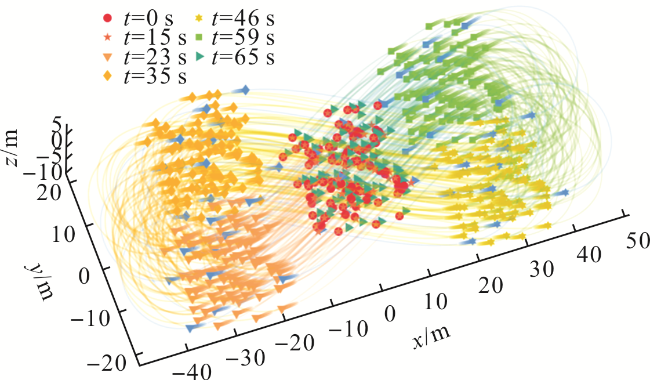
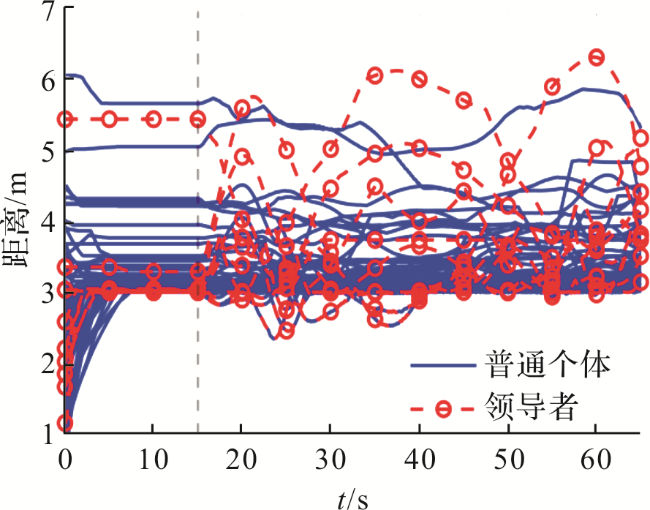
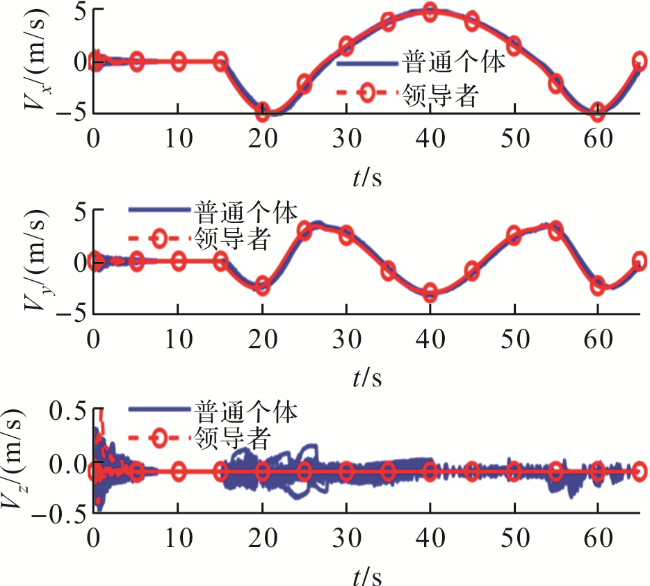
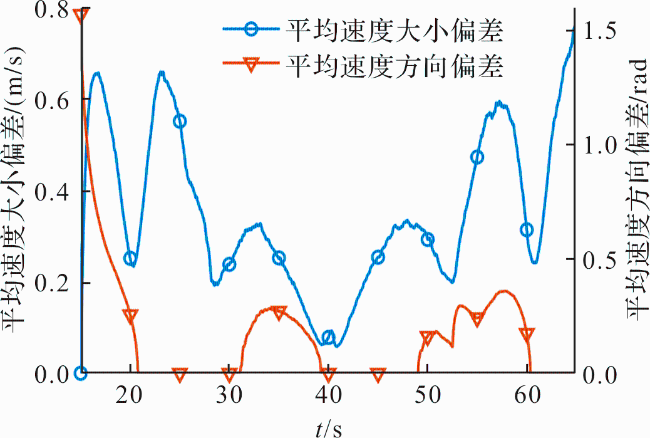
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}To realize the cooperative control of large-scale UAV swarm under a few leaders, a cooperative control method of UAV swarm based on specific limited interaction rules is proposed. The designed limited interaction rules mainly include two aspects: limited interaction design and interaction mechanism design. The limited interaction of UAV is realized by neighbor selection mechanism based on random line of sight occlusion relationship under limited field of view. The interaction mechanism between UAVs is designed from two aspects: position coordination and velocity coordination. The position coordination force is designed considering the flight safety of UAVs, and the velocity coordination force is designed considering the mission purpose of UAVs in different periods. The simulation results show that the designed limited interaction rules can achieve the cooperative tracking of the UAV swarm to the designated few leaders and complete the cooperative swarm movement of the designated trajectory.
unmanned aerial vehicle / limited interaction / interaction mechanism / cooperative control {{custom_keyword}} /
表1 仿真主要参数列表 |
| 序号 | 参数 | 数值 | 序号 | 参数 | 数值 | |
|---|---|---|---|---|---|---|
| 1 | ALoS,max/(°) | 80 | 8 | Krep | 3.2 | |
| 2 | φ/(°) | 100 | 9 | Kv,ini | 0.5 | |
| 3 | rpre/m | 15 | 10 | Kv,move | 8.8 | |
| 4 | rrep/m | 3 | 11 | nnor | 90 | |
| 5 | rUAV/m | 8 | 12 | nlea | 10 | |
| 6 | Vmax/(m/s) | 8 | 13 | Teig | 50 | |
| 7 | amax/(m/s2) | 5 |
| [1] |
段海滨, 何杭轩, 赵彦杰, 等. 2021年无人机热点回眸[J]. 科技导报, 2022, 40(1):215-227.
随着人工智能技术的发展以及机载任务平台性能的提升,2021年无人机技术与应用呈现新的发展态势。从无人机政策法规、自主控制、反无人机、应用领域等多方面回眸了2021年无人机的技术研究热点,分析了无人机技术领域未来的发展动向。人工智能、视觉导航等技术使无人机综合能力更加强大,也使其应用领域向更宽、更深、更综合方向拓展,尤其是人与机器人的共融联系随着人机交互技术的提升也更为紧密。综合而言,无人机向微型化、集群化、智能化、跨域化发展是必然趋势,无人机与人工智能的深度融合与跨平台实际应用仍然是当今和未来的研究热点。
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社,2018:5-13.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
张哲, 吴剑. 多无人机对组网雷达系统的协同干扰[J]. 弹箭与制导学报, 2019, 39(6):50-54.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
刘畅, 谢文俊, 张鹏, 等. 多目标群多基地多无人机协同任务规划[J]. 弹箭与制导学报, 2019, 39(1):119-124.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
周子为, 段海滨, 范彦铭. 仿雁群行为机制的多无人机紧密编队[J]. 中国科学:技术科学, 2017, 47(3):230-238.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
许晓伟, 赖际舟, 吕品, 等. 多无人机协同导航技术研究现状及进展[J]. 导航定位与授时, 2017, 4(4):1-9.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
We present a self-organizing model of group formation in three-dimensional space, and use it to investigate the spatial dynamics of animal groups such as fish schools and bird flocks. We reveal the existence of major group-level behavioural transitions related to minor changes in individual-level interactions. Further, we present the first evidence for collective memory in such animal groups (where the previous history of group structure influences the collective behaviour exhibited as individual interactions change) during the transition of a group from one type of collective behaviour to another. The model is then used to show how differences among individuals influence group structure, and how individuals employing simple, local rules of thumb, can accurately change their spatial position within a group (e.g. to move to the centre, the front, or the periphery) in the absence of information on their current position within the group as a whole. These results are considered in the context of the evolution and ecological importance of animal groups.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
于月平, 段海滨, 范彦铭, 等. 仿欧椋鸟大规模超机动行为的无人机集群转弯控制[J]. 机器人, 2020, 42(4):385-393.
为了在动态不确定环境下实现大规模无人机集群转弯的快速性和一致性,提出了一种仿欧椋鸟大规模超机动行为的无人机集群转弯控制方法.通过分析欧椋鸟大规模超机动行为,分别建立邻居选择、局部交互和信息传递机制,并将其映射到无人机集群转弯控制中.在这些机制的基础上,利用改进社会力模型进行无人机转弯控制,使无人机集群在没有外界刺激的情况下实现快速聚集和速度极化;而在有外界刺激的情况下,无人机切换模式,整个集群快速完成超机动转弯动作以避开危险.仿真实验结果表明,在该模型作用下无人机集群既能满足转弯曲率的要求,又能保持群集运动的一致性.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [17] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [18] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}