 PDF(1737 KB)
PDF(1737 KB)

Reentry Trajectory Estimation for Irregular Target Based on Single Optics Measurement
PAN Ligui, YIN Jiaqi, XU Chunguang
JPRMG ›› 2022, Vol. 42 ›› Issue (5) : 78-83.
PDF(1737 KB)
PDF(1737 KB)
Reentry Trajectory Estimation for Irregular Target Based on Single Optics Measurement
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}For the irregularly shaped ballistic reentry target, based on a single optics measurement, the initial reentry surface of the ballistic target is proposed as the basic constraint. The intersection of the optical sight vector and the initial reentry surface is utilized as the target position sequence, and the target position sequence corresponding to the optical measurement data sequence is obtained. Then the ballistic estimation sequence is obtained by the midpoint smoothing method. Based on the comprehensive consideration of the initial reentry surface deviation and the optical measurement data error, the estimation method of the reentry ballistic error is given. According to the simulation experiment, the results show that the method solves the problem that the measurement data from a single optics measurement is not enough to constrain the target position. And it can effectively estimate the ballistic parameters and the landing point deviation.
ballistic flight target / reentry target / estimation method / optics measurement {{custom_keyword}} /
| [1] |
刘利生. 外弹道测量数据处理[M].北京.国防工业出版社, 2002.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
刘利生. 外弹道测量精度分析与评定[M]. 北京: 国防工业出版社, 2010.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
江晓东, 谢京稳, 郭军海. 基于动力学模型的再入弹道估计方法研究[J]. 飞行器测控学报, 2011, 30(2):75-79.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
贺明科, 王正明. 光学接力跟踪的弹道融合[J]. 弹道学报, 2002, 14(1):1-7.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
张玲霞, 马彩文, 刘轶, 等. 靶场光电经纬仪多台交会测量的融合处理及其仿真分析[J]. 光子学报, 2002, 31(12):1528-1532.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
王春阳, 刘少英, 张月. 基于helmert的光雷数据融合处理方法[J]. 液晶与显示, 2019, 34(2):200-206.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
司文涛, 王伟超, 袁光福, 等. 基于测角交汇的大气折射修正方法[J]. 激光与光电子学进展, 2020, 57(13):99-103.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
胡小丽, 张玉伦, 刘彪, 等. 基于物距辅助的单站姿态处理方法[J]. 光学学报, 2019, 39(6):168-172.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
李国友, 付承毓, 何培龙. 基于单台雷达光电经纬仪的脱靶量测量方法[J]. 弹箭与制导学报, 2012, 32(6):177-178.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
詹武平, 郑永煌, 王金霞. 单台光学设备跟踪再入目标的外弹道计算方法[J]. 遥测遥控, 2016, 37(5):35-39.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
詹武平, 占洪涛, 郑永煌. 利用单台光学设备确定卫星轨道的方法[C]// 第十四届全国信号和智能信息处理与应用学术会议论文集. 绵阳: 太赫兹科学与电子信息学报编辑部,2021:258-260.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
湛必胜, 秦志强, 王明海. 螺旋再入弹道特性分析[J]. 弹道学报, 2006, 18(3):18-21.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
郦苏丹, 任萱, 吴瑞林. 再入弹头的螺旋机动研究[J]. 宇航学报, 2000, 21(4):41-48.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|


 PDF(1737 KB)
PDF(1737 KB)
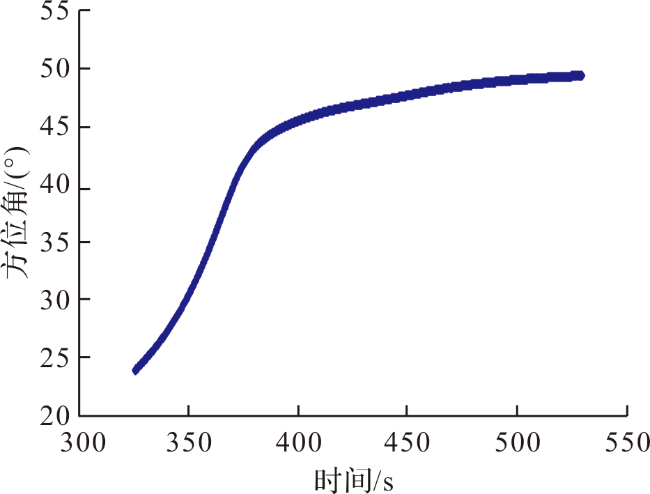
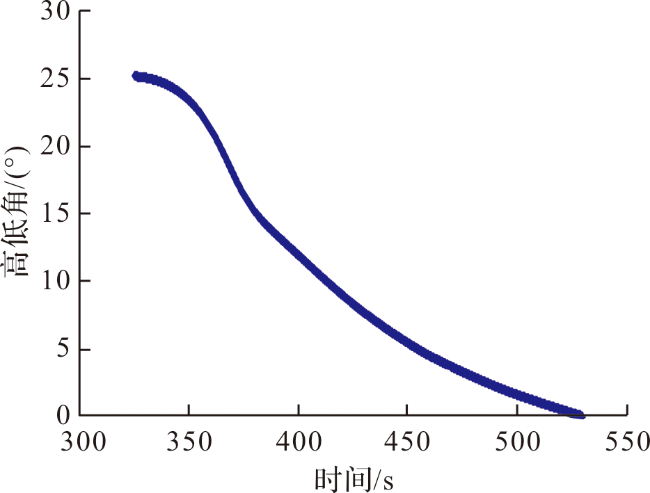
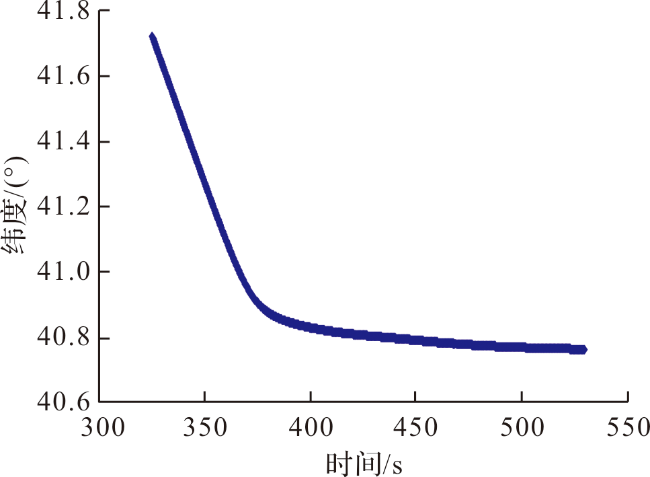
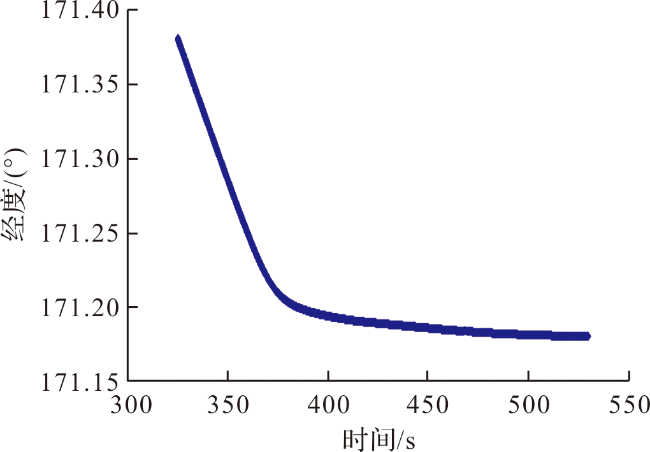
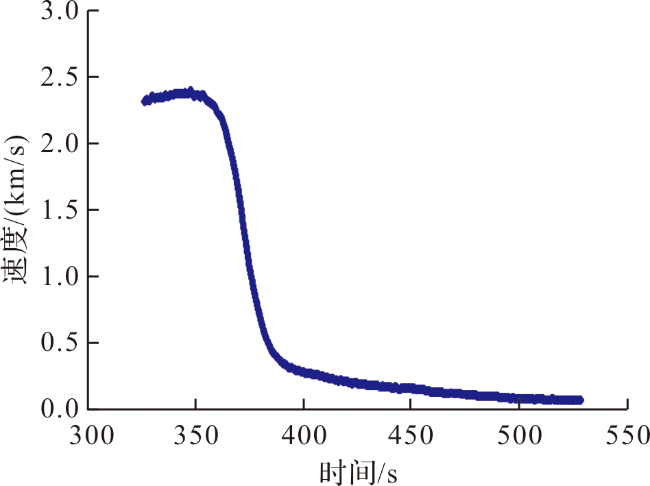
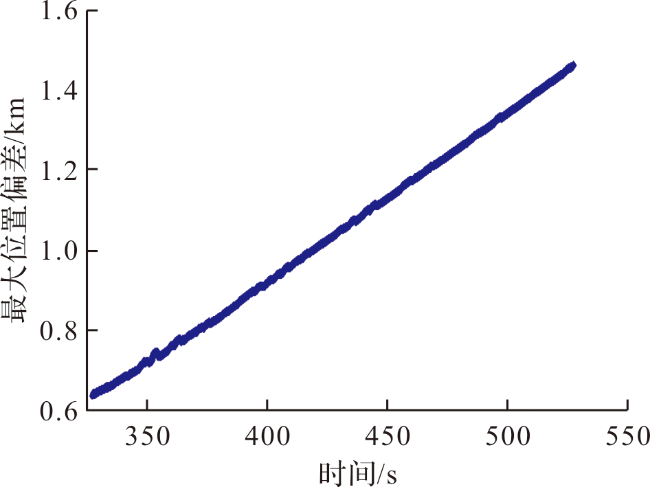
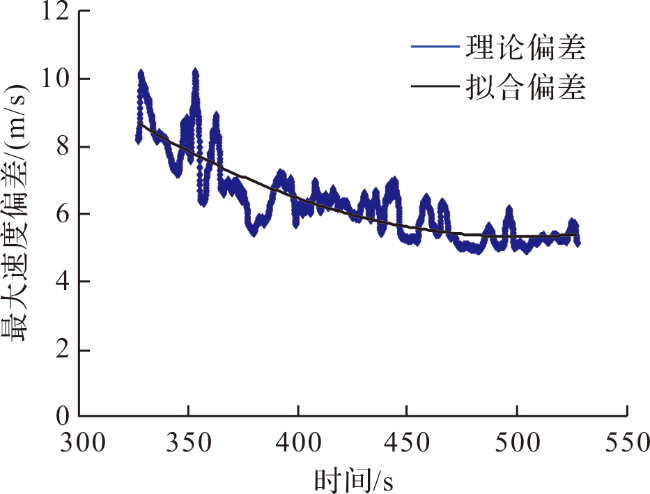
 图1 飞行目标运动管道及管道中心线示意图图2 再入目标和光测设备视线矢量在初始射面的投影示意图图3 飞行目标再入弹道估值示意图图4 初始射面内弹道最大波动范围示意图图5 方位角测量数据曲线图6 高低角测量数据曲线图7 再入飞行目标纬度变化曲线图8 再入飞行目标经度变化曲线图9 再入飞行目标高程变化曲线图10 再入飞行目标速度变化曲线图11 再入飞行目标估算弹道最大位置偏差曲线图12 再入飞行目标估算弹道最大速度偏差曲线
图1 飞行目标运动管道及管道中心线示意图图2 再入目标和光测设备视线矢量在初始射面的投影示意图图3 飞行目标再入弹道估值示意图图4 初始射面内弹道最大波动范围示意图图5 方位角测量数据曲线图6 高低角测量数据曲线图7 再入飞行目标纬度变化曲线图8 再入飞行目标经度变化曲线图9 再入飞行目标高程变化曲线图10 再入飞行目标速度变化曲线图11 再入飞行目标估算弹道最大位置偏差曲线图12 再入飞行目标估算弹道最大速度偏差曲线/
| 〈 |
|
〉 |






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}