 PDF(8030 KB)
PDF(8030 KB)

Design of Tilting Rotor Control System Based on Gain Scheduling Method
SONG Xiaodong, WU Bin, SANG Tao
JPRMG ›› 2021, Vol. 41 ›› Issue (6) : 23-28.
PDF(8030 KB)
PDF(8030 KB)
Design of Tilting Rotor Control System Based on Gain Scheduling Method
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}Analyzing the dynamic model of the tilting four rotor, the gain scheduling controller is designed with tilting angle as the scheduling parameter, with pole allocation by MATLAB software at the equilibrium point, calculating to obtain the control parameters of each equilibrium point. Speed adaptive term is introduced to solve the error in linearization model. The error quaternion method is used as the input of the controller to avoid the ruler angle singular problem while the vertical take-off and landing. Experiments show that this method has better control effect.
UAV / flight control / gain scheduling / quaternion {{custom_keyword}} /
表1 倾转旋翼机基本参数 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 起飞重量/kg | 5.0 | 翼展/m | 1.13 |
| 巡航速度/(m/s) | 20.0 | 航程/km | 10.0 |
| 单电机最大推力/N | 25 | 翼面积/m2 | 0.286 |
| [1] |
路平, 肖文健. 倾转机身无人机俯仰角奇异问题研究[J]. 飞行力学, 2013, 31(5):429-432.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
潘震, 池程芝, 张竞凯, 等. 基于自抗扰滑模理论的倾转旋翼飞行器非线性姿态控制研究[J]. 航空兵器, 2018(6):44-49.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
张飞, 路平, 江涛, 等. 基于模糊控制的倾转三旋翼无人机过渡模式操纵策略研究[J]. 电光与控制, 2018, 25(4):32-36.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
陈晓, 王晓燕, 王新民, 等. 改进的倾转旋翼机平稳过渡控制系统设计[J]. 计算机工程与应用, 2019, 155(21):253-259.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
唐胜景, 李梦婷, 刘真畅, 等. 串置翼垂直起降无人机过渡机动飞行控制[J]. 系统工程与电子技术, 2019, 41(6):1342-1350.
针对新型串置翼布局推力矢量无人机在垂直起降、过渡机动飞行过程中强非线性、强耦合及控制冗余的问题,采用动态逆控制方法设计全局控制系统,无需针对不同飞行模式切换控制策略。在此基础上,提出二级递进式控制分配策略,将序列二次规划、链式递增方法相结合,对航迹回路和姿态回路的控制量进行综合优化分配。同时,根据任务需求及飞行状态,基于离线数据库在线实时更新直接力控制分配目标函数权值。采用松弛约束策略,局部放宽非线性优化问题约束,增加优化求解速度。仿真结果表明该控制器能够有效跟踪高机动目标航迹。
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
鲁可, 刘春生, 汪正中, 等. 倾转旋翼飞行器飞行力学建模及验证分析[J]. 系统工程与电子术, 2017, 39(4):910-916.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
范和平. 基于QFT的倾转旋翼飞行器控制律设计[D]. 南京: 南京航空航天大学, 2017.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
高阳, 吴文海, 周思羽. 垂直/短距起降飞机非线性动力学建模与仿真[J]. 哈尔滨工业大学学报, 2019, 51(4):115-122.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
蒋睿, 魏蛟龙, 岑朝辉. 基于四元数反馈的卫星姿态控制系统仿真模型建立[J]. 系统仿真学报, 2009, 21(19):6260-6265.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|


 PDF(8030 KB)
PDF(8030 KB)
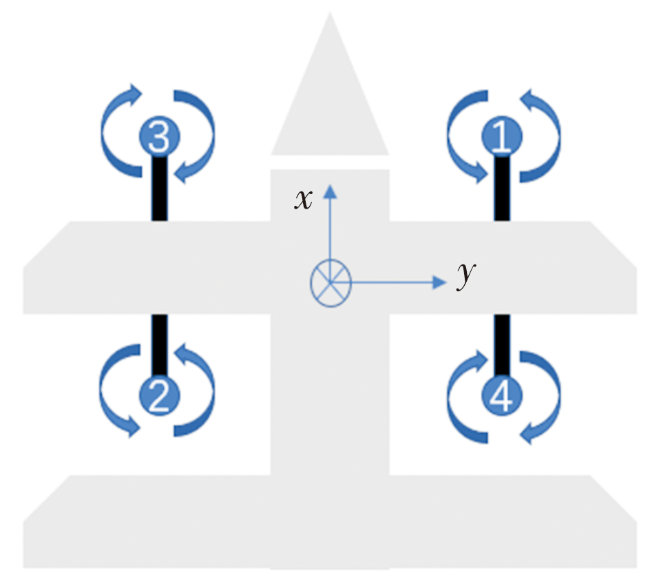
 图1 倾转机构图2 飞机布局
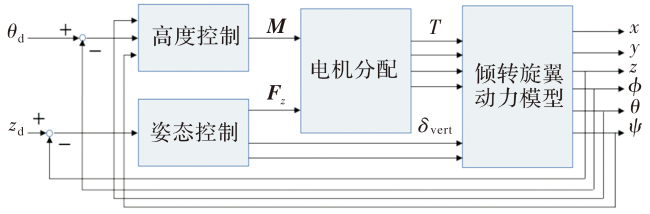
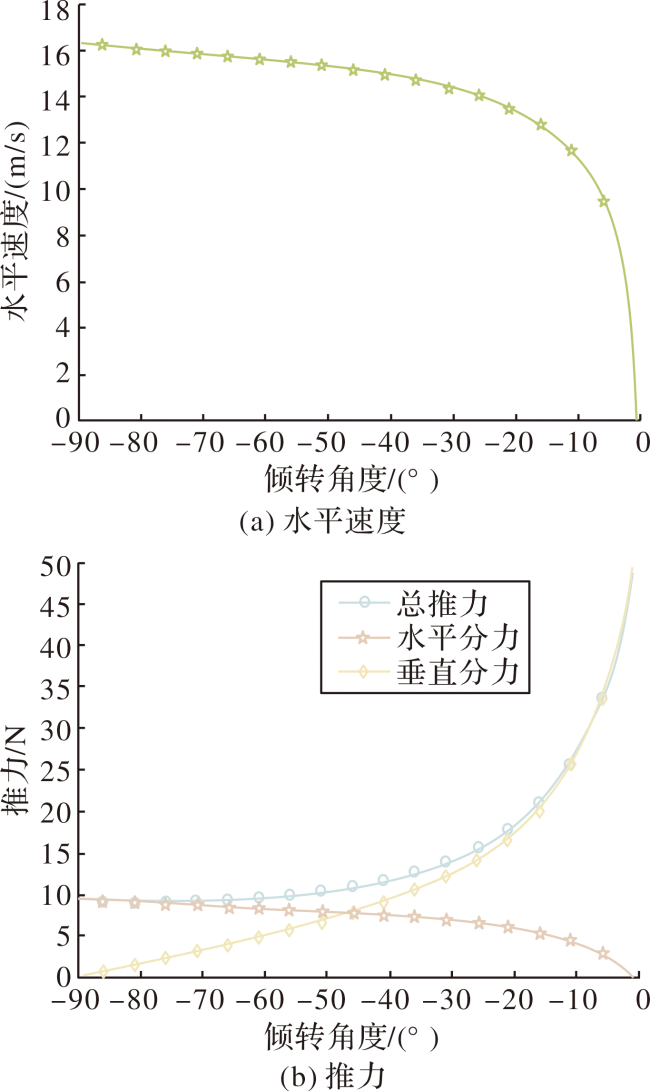
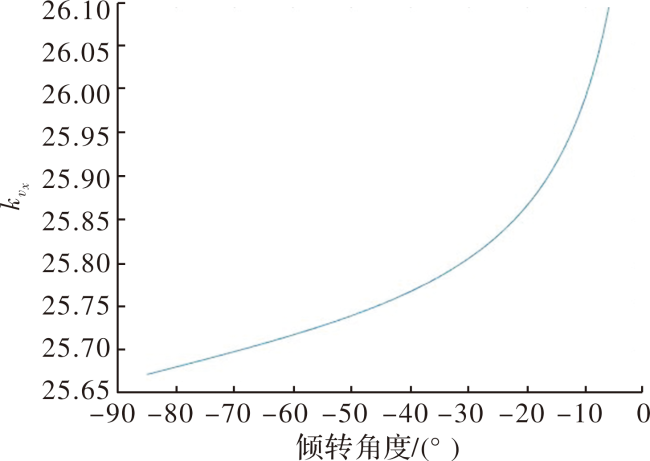
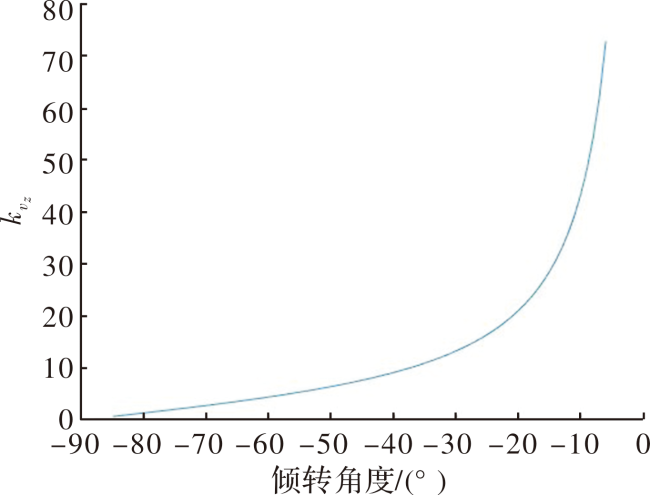
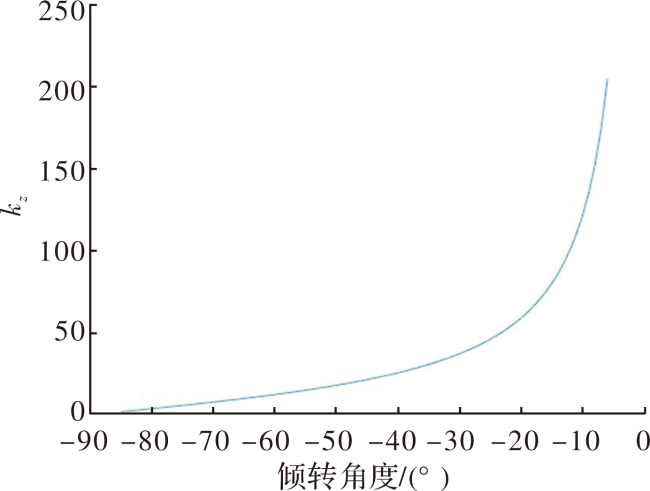
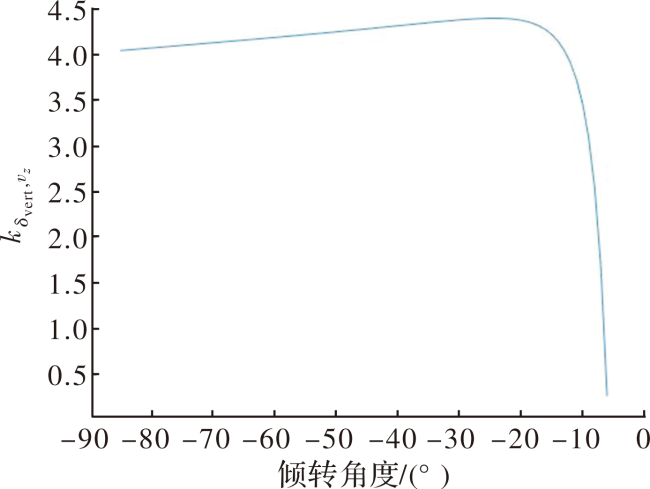
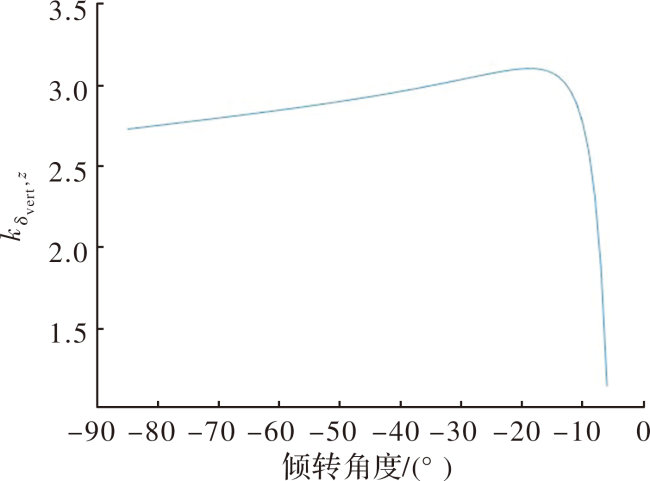
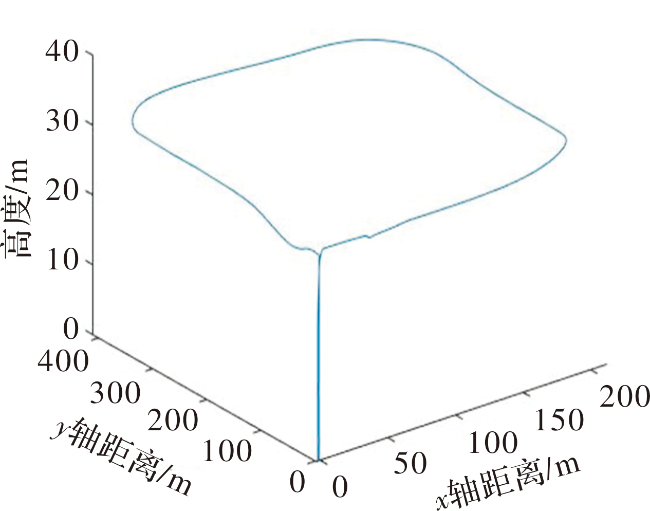
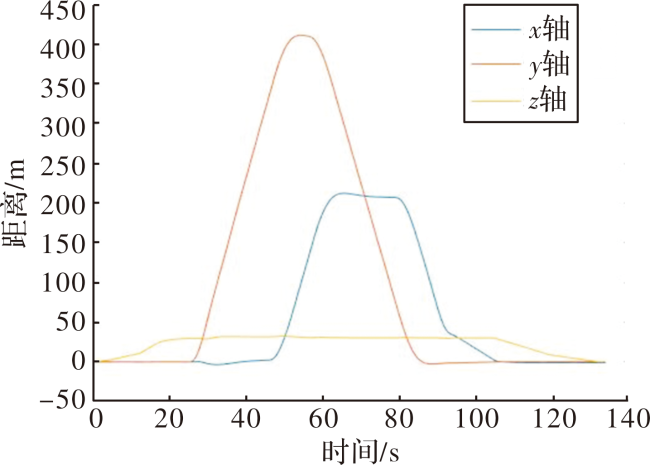
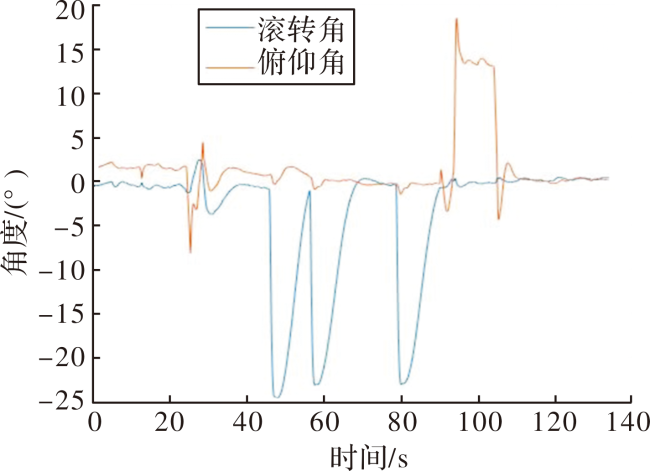
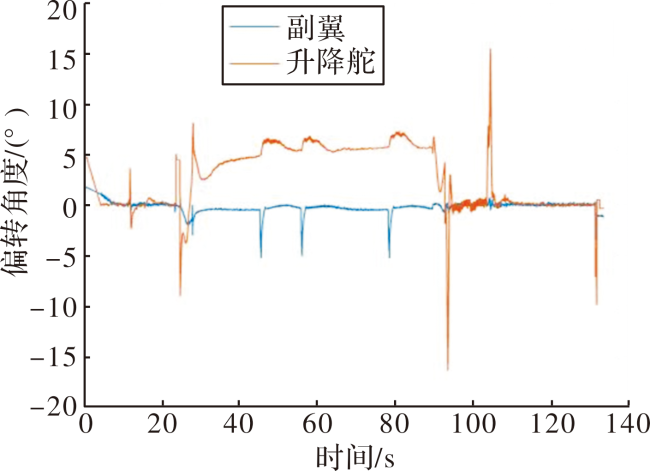
图1 倾转机构图2 飞机布局 表1 倾转旋翼机基本参数图3 短舱坐标系图4 控制系统图5 水平速度、推力与倾转角度关系图6 k v x与倾转角度关系图7 k v z与倾转角度关系图8 kz与倾转角度关系图9 k δ v e r t , v z与倾转角度关系图10 k δ v e r t , z与倾转角度关系图11 三维航迹图图12 沿轴向位移图13 姿态角曲线图14 舵面偏转角图15 飞行速度
表1 倾转旋翼机基本参数图3 短舱坐标系图4 控制系统图5 水平速度、推力与倾转角度关系图6 k v x与倾转角度关系图7 k v z与倾转角度关系图8 kz与倾转角度关系图9 k δ v e r t , v z与倾转角度关系图10 k δ v e r t , z与倾转角度关系图11 三维航迹图图12 沿轴向位移图13 姿态角曲线图14 舵面偏转角图15 飞行速度/
| 〈 |
|
〉 |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}